Future-Trend-Aware Filter-based PD-MRAC Method for Quadrotors with Unknown Strong Disturbances
IEEE Transactions on Robotics (TRO), 2026
Yanhua Yang1,2, Chenxin Yu1, Xiongtao Shi1,2,*, Changchun Hua3, James Lam2, Youmin Gong1, Jie Mei1,*
1 Harbin Institute of Technology (Shenzhen), Shenzhen, China
2 The University of Hong Kong, Hong Kong
3 Yanshan University, Qinhuangdao, China



*Corresponding authors: Jie Mei (jmei@hit.edu.cn) and Xiongtao Shi (xotaoshi@hku.hk)
🎥 0. Presentation Video
| Presentation Video: Demonstrating the superior disturbance rejection of our proposed PD-MRAC framework. The video showcases how the future-trend-aware mechanism breaks the classical adaptation speed-stability trade-off, enabling stable flight and precise formation control under strong time-varying wind disturbances. |
🖼️ 1. Teaser Overview
 (a) PyBullet scene for single quadrotor flight. (a) PyBullet scene for single quadrotor flight. |
|
 (c) Real‑world flights under strong wind. (c) Real‑world flights under strong wind. |
 (d) Position tracking under strong wind. (d) Position tracking under strong wind. |
 (e) PyBullet scene for multiple‑quadrotor formation. (e) PyBullet scene for multiple‑quadrotor formation. |
|
 (g) Indoor experimental formation. (g) Indoor experimental formation. |
 (h) Outdoor experimental formation. (h) Outdoor experimental formation. |
Figure 1. Comprehensive validation of the proposed Future-Trend-Aware Filter-based PD-MRAC framework under unknown strong disturbances. By incorporating a trend-aware derivative term as an explicit damping mechanism, the controller breaks the inherent speed-stability trade-off of classical adaptive laws. It yields a 57.42% RMSE reduction versus the best baseline in simulation and outperforms the commercial-grade DJI Mavic 2 by 11.81% in real-world wind tests ( m/s). The methodology effectively mitigates network-propagate disturbances across formations, scaling from single-drone tracking to large-scale coordination under stochastic natural wind.
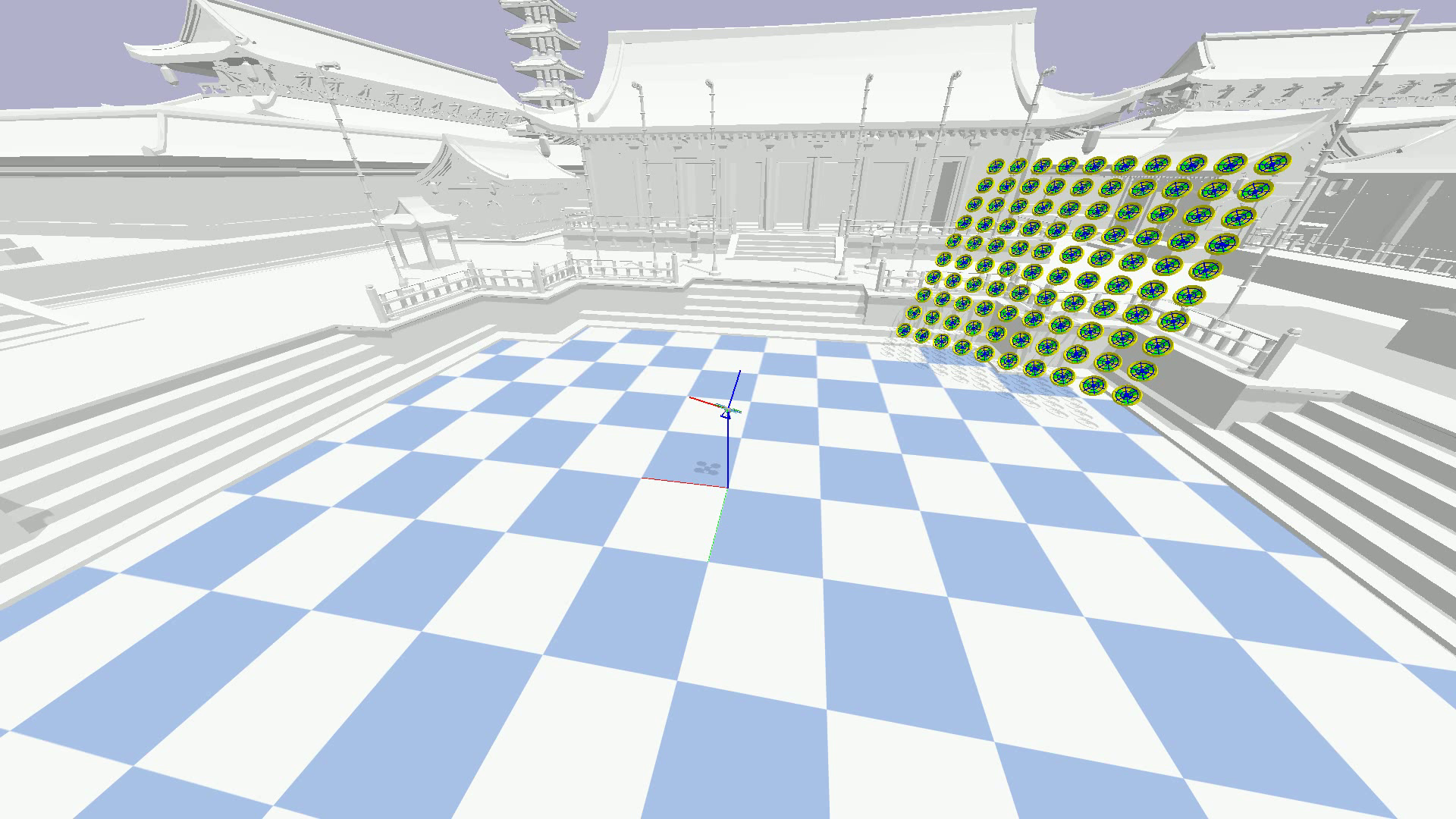
• (a). High-fidelity PyBullet simulation environment featuring a single quadrotor subject to unknown, spatially varying wind fields generated by virtual high-power fan arrays.
• (b). Comparative 3D tracking trajectories: The proposed PD-MRAC (Red, RMSE 0.0691) maintains a smooth path, whereas the standard P-MRAC (Blue, RMSE 0.2857) exhibits severe high-frequency oscillations, demonstrating the derivative term's ability to provide future foresight and suppress high-gain induced instability.
• (c). Real-world flight setup: Benchmarking our custom-built quadrotor (right) and a DJI Mavic 2 (left) against W industrial fans providing a turbulent near-field wind environment for rigorous rejection evaluation.
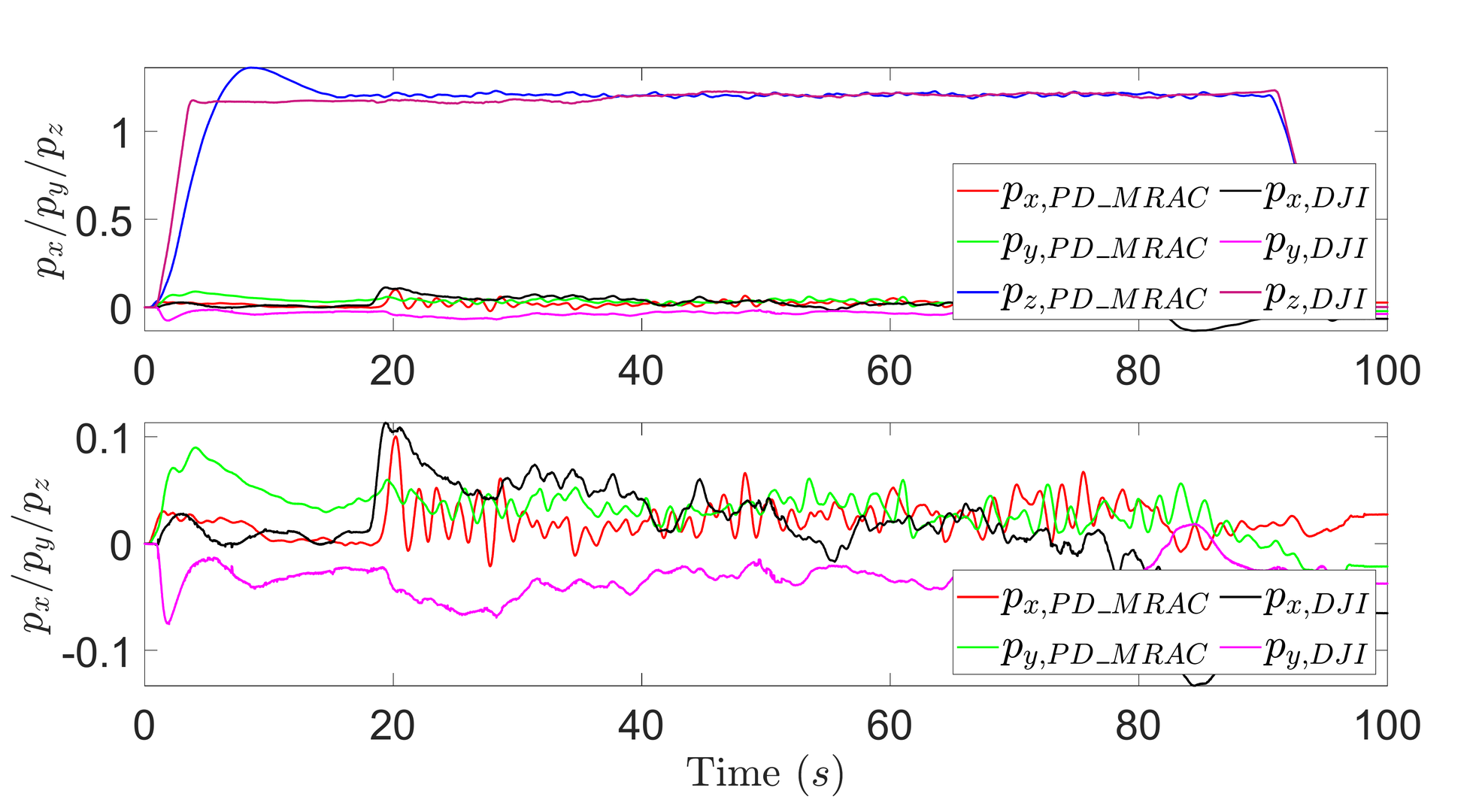
• (d). Position tracking performance: Quantitative analysis across axes (top) and the plane (bottom). Our PD-MRAC (RMSE 0.0254) achieves tighter regulation and faster recovery than the industrially-tuned DJI Mavic 2 (RMSE 0.0288), validating superior robustness in practical deployment.
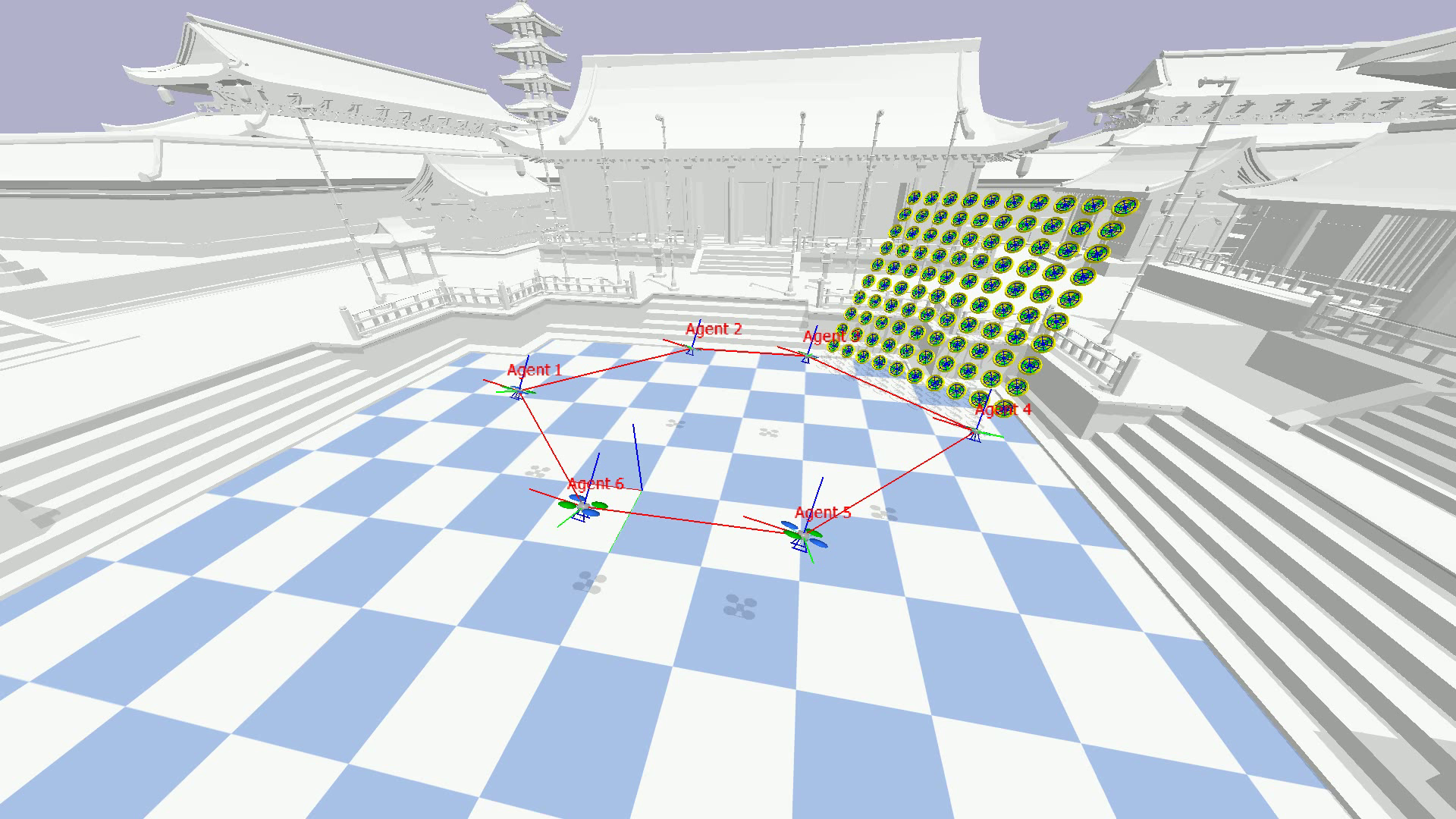
• (e). Multi-quadrotor formation simulation in PyBullet, where six quadrotors coordinate over a directed graph while facing coupled aerodynamic forces and unknown time-varying parameter uncertainties.
• (f). Formation trajectory analysis: Distributed PD-MRAC ensures stable and cohesive tracking (RMSE 0.0740), while P-MRAC suffers from network-propagated oscillations (RMSE 0.2715) that circulate and amplify through neighbor dependencies.
• (g). Indoor experimental formation: Successful coordination despite complex rotor-induced aerodynamic wake interference and downwash effects in confined spaces, maintaining a precise geometry even with strong fan disturbances (RMSE 0.0416).
• (h). Outdoor experimental formation: Demonstrating the environment-invariant generalization of the algorithm under stochastic natural wind, achieving reliable coordination across two different viewpoints without any parameter re-tuning (RMSE 0.0390).*
📝 2. Abstract
With the rapid development of quadrotor systems, the ability to achieve highly accurate and stable flight in complex environments, especially under strong wind disturbances, has become critically important for both single quadrotor and multiple quadrotor cooperative missions. To handle such disturbances, traditional approaches either utilize learning-based models to approximate wind disturbances, which come at the cost of high computational complexity, or adopt error-based adaptive control methods, which often face a trade-off between adaptation speed and system stability, making parameter tuning challenging. To address these issues, this paper proposes a future-trend-aware filter-based PD-MRAC (Proportional-Derivative Model Reference Adaptive Control) for autonomous stable flight of single quadrotor, and a distributed future-trend-aware filter-based PD-MRAC framework for multiple quadrotor formation. By incorporating a future-trend-aware filter-based derivative term, the proposed approach gains partial foresight of future dynamics, allowing it to achieve a high adaptation rate while mitigating the oscillations, thereby enabling robust and stable flight under disturbances. Furthermore, for the more disturbance-sensitive distributed control of multiple quadrotor systems, a robust distributed formation control algorithm is developed under a directed graph, enabling effective and resilient coordination among quadrotors. This method significantly enhances disturbance rejection capabilities while maintaining low computational overhead and enabling fast adaptive updates. Extensive simulations and real-world experiments are conducted. For single quadrotors, both simulation and experimental results demonstrate a significant reduction in root-mean-square error (RMSE), which is 57.42% lower than the baseline method. Even when compared with the industrial-grade DJI Mavic 2, the proposed future-trend-aware filter-based PD-MRAC approach achieves an RMSE reduction of 11.81 %. For multiple quadrotors, both double quadrotors and larger-scale formations are conducted. Simulations validate enhanced robustness and indoor/outdoor experiments validate the effectiveness of the proposed algorithms under strong disturbances.
💡 3. Key Contributions
The proposed Future-Trend-Aware Filter-based PD-MRAC framework establishes a robust and high-performance solution for quadrotor flight under unknown, time-varying, and strong disturbances. The core innovations are summarized as follows:
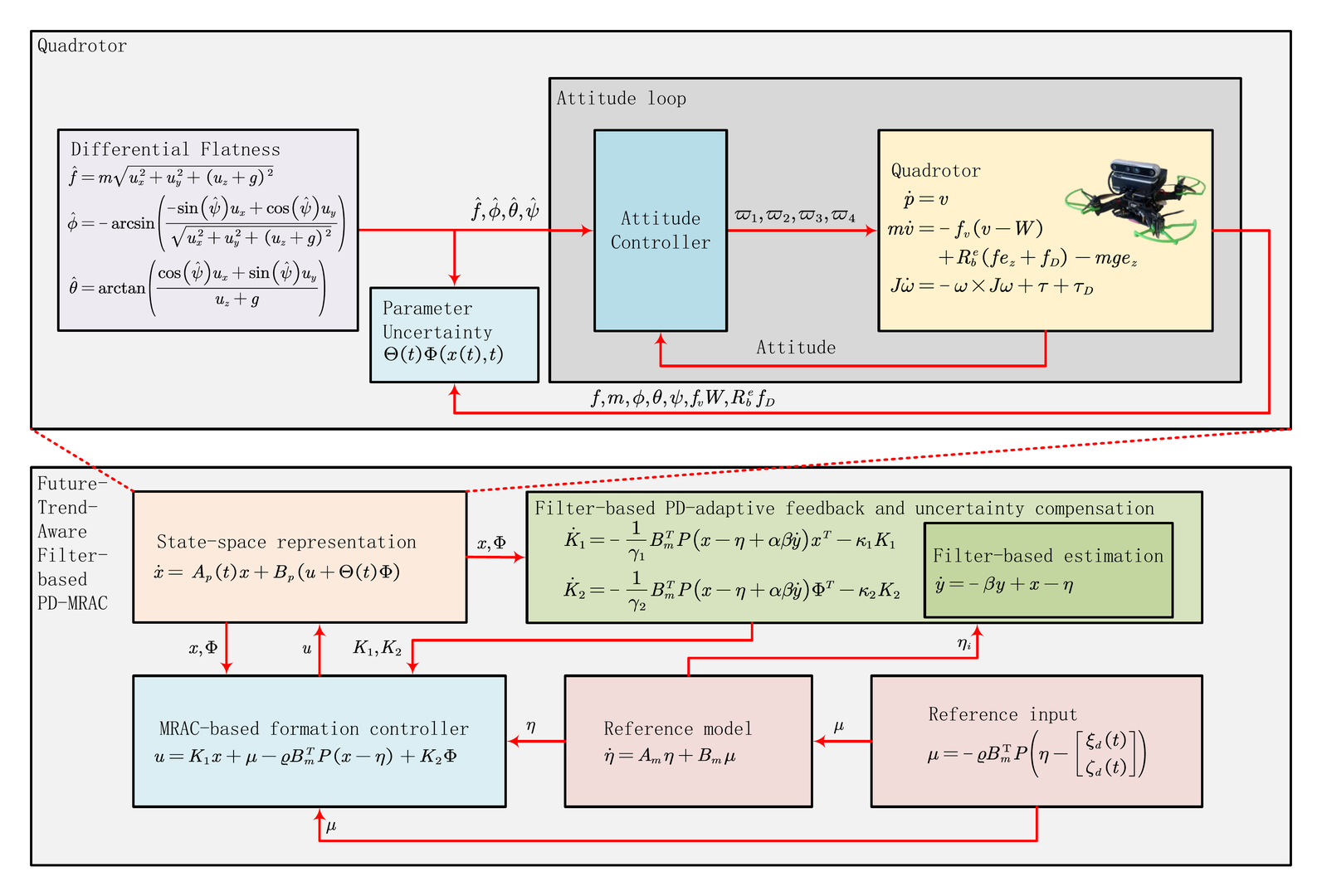
• Unified Modeling via Novel Generalized Time-Varying State-Space Representation: The dynamics of quadrotors is reconstructed into second-order nonlinear dynamics that accounts for attitude tracking error, unknown time-varying aerodynamic damping, and unknown strong wind disturbances. As a result, it is reformulated as a novel generalized time-varying state-space representation, i.e., , where and are time-varying and unknown, is a known state-dependent nonlinear function. This formulation allows for simultaneously considering these influential factors in the system dynamics, enabling unified treatment of multiple interacting uncertainties.
• Breakthrough in Speed-Stability Trade-off via Trend-Aware Foresight: A future-trend-aware filter-based Proportional-Derivative Model Reference Adaptive Control (PD-MRAC) framework is proposed for single quadrotor with unknown time-varying dynamics. By innovatively introducing a filtered differential velocity term into the update laws, the proposed scheme gains foresight of future dynamics, enabling fast adaptive response while effectively suppressing high-frequency oscillations. This superior disturbance rejection capability is validated through extensive benchmarks against classical control approaches and the commercial grade DJI Mavic 2, where the proposed method demonstrates significantly lower tracking RMSE under strong time-varying wind disturbances.
• Resilient Distributed Architecture against Network-Propagate Disturbances: Building upon the single quadrotor controller, a distributed future-trend-aware filter-based PD-MRAC architecture is developed for multiple quadrotors. By relying only on local neighbor information, the algorithm enables a decentralized and efficient control strategy that ensures both tracking accuracy and cooperative formation stability, even under shared aerodynamic disturbance and network-propagate disturbance. The control formulation explicitly accounts for the compounded effects of wind disturbances, which propagate across the communication network through internal quadrotor information dependencies. The comprehensive simulations and comparative real-world experiments, including both indoor and outdoor environments with two and multiple quadrotors, validate the algorithm's enhanced disturbance rejection capability under strong wind conditions.
These contributions collectively provide a principled, scalable, and computationally efficient framework that bridges the gap between theoretical adaptive control and the stringent reliability requirements of real-world aerial robotic missions.
🛠️ 4. Methodology
 Single-quadrotor PD-MRAC diagram. Single-quadrotor PD-MRAC diagram. |
 Distributed PD-MRAC for quadrotor formation. Distributed PD-MRAC for quadrotor formation. |
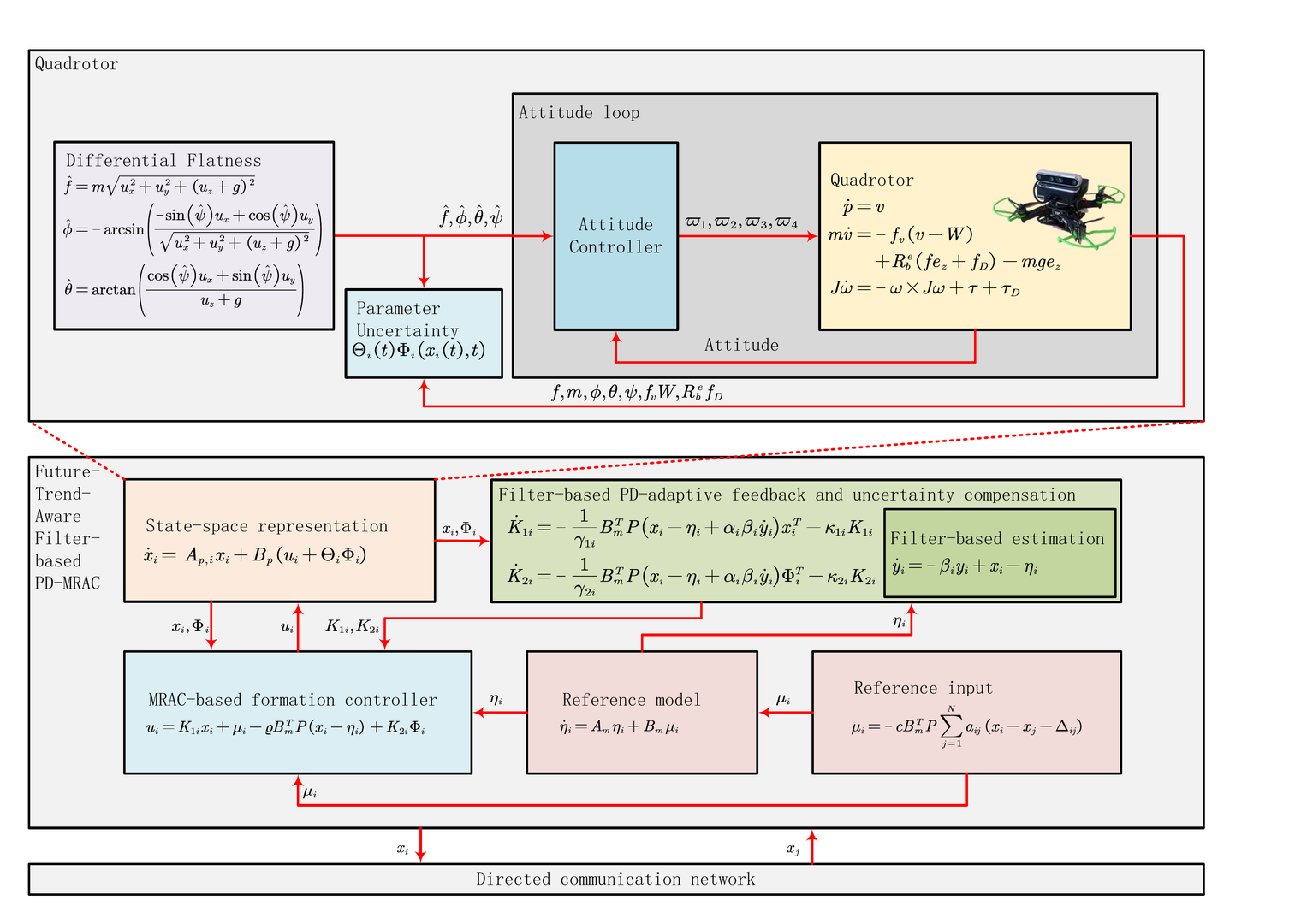
The proposed methodology consists of two main components: a PD-MRAC controller for single-quadrotor tracking, and its distributed extension for multi-quadrotors formation flight. Both rely on a future-trend–aware filter-based derivative term that enhances adaptation while ensuring Lyapunov stability.
Left: The single-quadrotor PD-MRAC diagram illustrates the key modules of the control architecture. The reference model generates ideal position and velocity trajectories, while the tracking error is computed in real time. The adaptive loop includes both proportional and future-trend–aware derivative terms, governed by adaptation gains , , and . The novel derivative component is derived from a low-pass filtered forward difference of the error signal, effectively anticipating future dynamics and suppressing high-frequency oscillations. The output of the controller is then passed to the PX4 low-level autopilot for thrust and attitude control. Lyapunov-based analysis guarantees closed-loop stability under bounded unknown disturbances.
Right: The distributed PD-MRAC diagram extends the single-quadrotor scheme to a network of quadrotors communicating over a directed graph . Each quadrotor tracks a local reference generated from neighbor information, and applies the same future-trend–aware PD-MRAC structure in a fully decentralized manner. The formation controller relies on local error dynamics and minimal message exchange, allowing scalability to large network. Robustness is preserved even under asymmetric topologies and inter-quadrotor aerodynamic coupling. The same Lyapunov framework is used to prove stability for the entire formation.
Together, these two modules form a control strategy that is both accurate and robust to external disturbances, enabling real-time deployment in diverse mission settings.
📊 5. Simulation Results
We first conduct extensive simulation studies to evaluate the effectiveness and performance advantages of the proposed controller under controlled and repeatable conditions. These simulations allow for systematic analysis across a wide range of disturbance magnitudes, controller parameters, and formation configurations. In particular, we focus on quantifying tracking accuracy, convergence speed, and robustness to wind disturbances. The proposed future-trend-aware filter-based PD-MRAC is benchmarked against six widely used baseline methods. These include classical nonlinear control, model-predictive control, and various adaptive control schemes. All controllers are tested under the same wind disturbance and trajectory profiles for fair comparison. Both 3D trajectory plots and time-domain results are provided, along with RMSE metrics.
5.1. Single quadrotor simulation validation
We begin with a series of simulations on a single quadrotor system to isolate and highlight the core benefits of the proposed PD-MRAC. The goal is to track a smooth 3D reference trajectory in the presence of a constant wind disturbance m/s. The following subsections compare different controllers in terms of their trajectory tracking performance. Each subsection presents both visual trajectories and quantitative metrics such as RMSE, illustrating how each method handles the disturbance. This staged analysis ultimately demonstrates that the PD-MRAC achieves the highest tracking accuracy and robustness among all tested methods.
5.1.1. Simulation results with different methods
To validate the performance of the proposed PD-MRAC controller, we conduct a comprehensive comparison with six widely used control strategies under identical simulation conditions. Each controller is tasked with following the same reference trajectory in the presence of a persistent wind disturbance m/s. The evaluation focuses on the accuracy, convergence speed, and robustness to disturbance, as quantified by the root-mean-square error (RMSE) in 3D space.
5.1.1.1. Position/Velocity Trajectories — Nonlinear Control
 Nonlinear control (RMSE 0.5999). Nonlinear control (RMSE 0.5999). |
3D dynamic flight with nonlinear control (RMSE 0.5999). |
The baseline nonlinear controller is tuned for a hover task but has no explicit disturbance‐rejection term. Under a constant wind of m/s the quadrotor shows a peak positional deviation of almost 0.3 m during the first 2 s and settles only slowly thereafter. The resulting root-mean-square error (RMSE) of 0.5999 m highlights the limited robustness of a purely model-based strategy in harsh conditions.
5.1.1.2. Position/Velocity Trajectories — KNODE‑MPC
 KNODE‑MPC (RMSE 0.2007). KNODE‑MPC (RMSE 0.2007). |
3D dynamic flight with KNODE‑MPC (RMSE 0.2007). |
A model-predictive controller augmented with a KNODE linearisation accelerates convergence: the steady-state position error drops below 0.08 m after 5 s. Nevertheless, wind-induced bias remains uncompensated, yielding an overall RMSE of 0.2007 m, about three times smaller than the nonlinear baseline but still well above our target.
5.1.1.3. Position/Velocity Trajectories — Adaptive Control (clip ±1.0×[2,4,3])
| 3D dynamic flight with adaptive (RMSE 0.1509). |
With a generous saturation bound the adaptive estimator responds almost instantaneously, cancelling most of the mean disturbance. Positional excursions drop below 0.08 m after 3 s and the overall RMSE converges to 0.1509. A few outliers persist on the wind-aligned -axis and -axis, yet no sustained oscillation is observed.
5.1.1.4. Position/Velocity Trajectories — Adaptive Control (clip ±0.7×[2,4,3])
| 3D dynamic flight with adaptive (RMSE 0.2482). |
Reducing the bound throttles the estimator and delays compensation; the quadrotor exhibits a 0.12–0.15 m bias during the first 4 s and requires twice as long to converge. The tightened limit also amplifies estimator lag, so wind-driven peaks propagate further, lifting the RMSE to 0.2482.
5.1.1.5. Position/Velocity Trajectories — P‑MRAC ( = 0.0, )
| 3D dynamic flight with P-MRAC (RMSE 0.1623). |
Pure MRAC using only proportional adaptation achieves relatively fast error decay. When the gain is set to , the system converges within a few seconds, but exhibits mild oscillations before settling. The resulting RMSE is 0.1623.
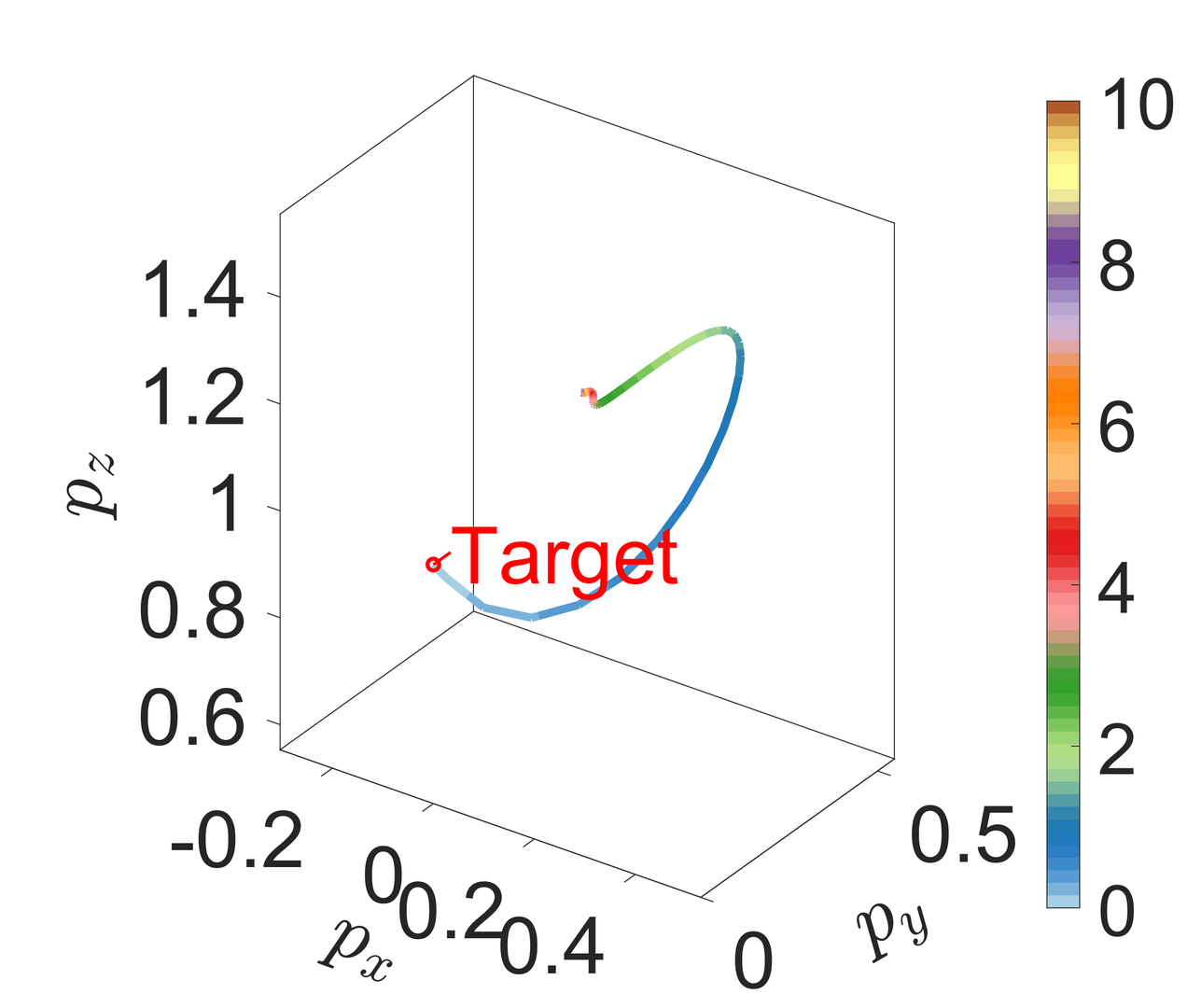
5.1.1.6. Position/Velocity Trajectories — P‑MRAC (, )
| 3D dynamic flight with P-MRAC (RMSE 0.2857). |
Lowering the gain to reduces the controller's responsiveness, causing slower convergence and severe oscillations. This compromises both accuracy and smoothness, increasing the RMSE to 0.2857. The results highlight the inherent trade-off in MRAC between adaptation aggressiveness and damping robustness.
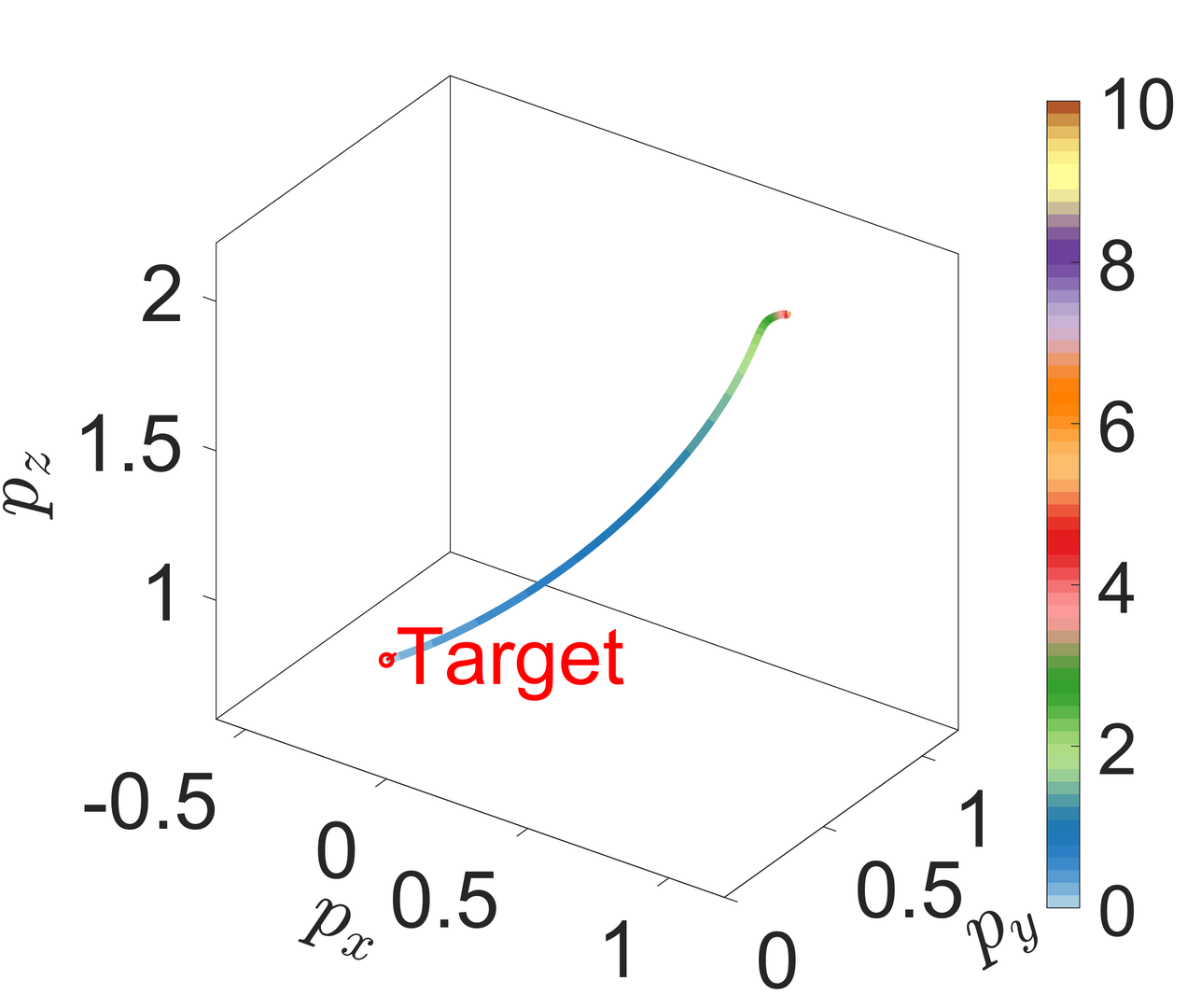
5.1.1.7. Position/Velocity Trajectories — Proposed PD‑MRAC (, )
| 3D dynamic flight with PD-MRAC (RMSE 0.0691). |
Introducing the future-trend–aware derivative term, , breaks the speed-vs-damping compromise. The quadrotor converges within 1 s, shows no visible overshoot, and maintains steady-state error. The resulting RMSE of 0.0691 m outperforms the best proportional MRAC by 57.42%.
5.1.1.8. Method Comparison (RMSE)
Method Table
| Nonlinear | 0.5999 |
| KNODE‑MPC | 0.2007 |
| adaptive (clip ±1.0×[2,4,3]) | 0.1509 |
| adaptive (clip ±0.7×[2,4,3]) | 0.2482 |
| P‑MRAC ( = 0.0, ) | 0.1623 |
| P‑MRAC ( = 0.0, ) | 0.2857 |
| PD‑MRAC (Ours) ( = 0.3, ) | 0.0691 |
Among all seven controllers evaluated, the proposed PD-MRAC consistently achieves the lowest median tracking error.
Method Boxplot
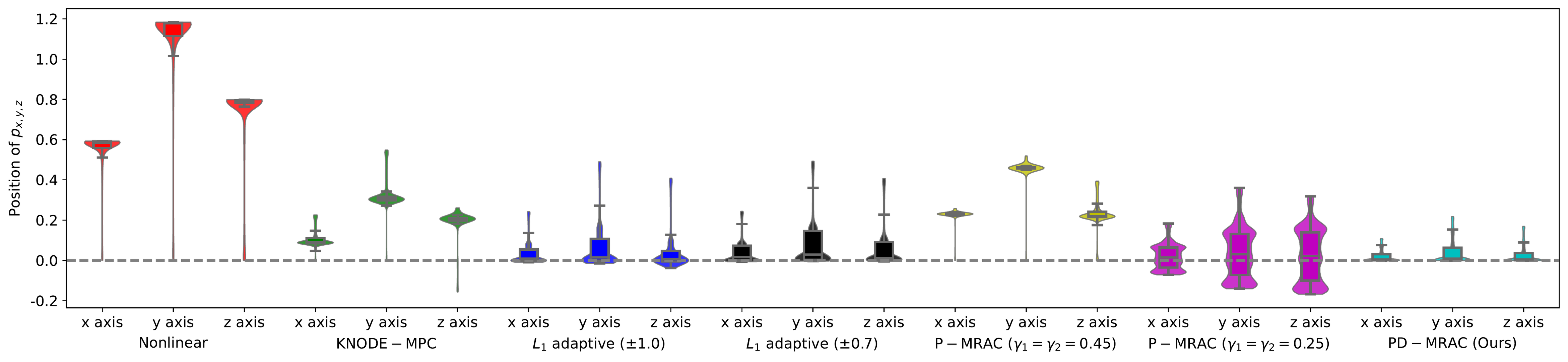 Boxplot comparison of tracking performance for different control methods under strong wind disturbances. Boxplot comparison of tracking performance for different control methods under strong wind disturbances. |
The violin and box plots collectively illustrate superior performance in terms of accuracy, reflected by reduced bias, and robustness, reflected by reduced variance. These improvements are consistently observed under identical strong wind disturbances, demonstrating both the stability and reliability of the proposed method.
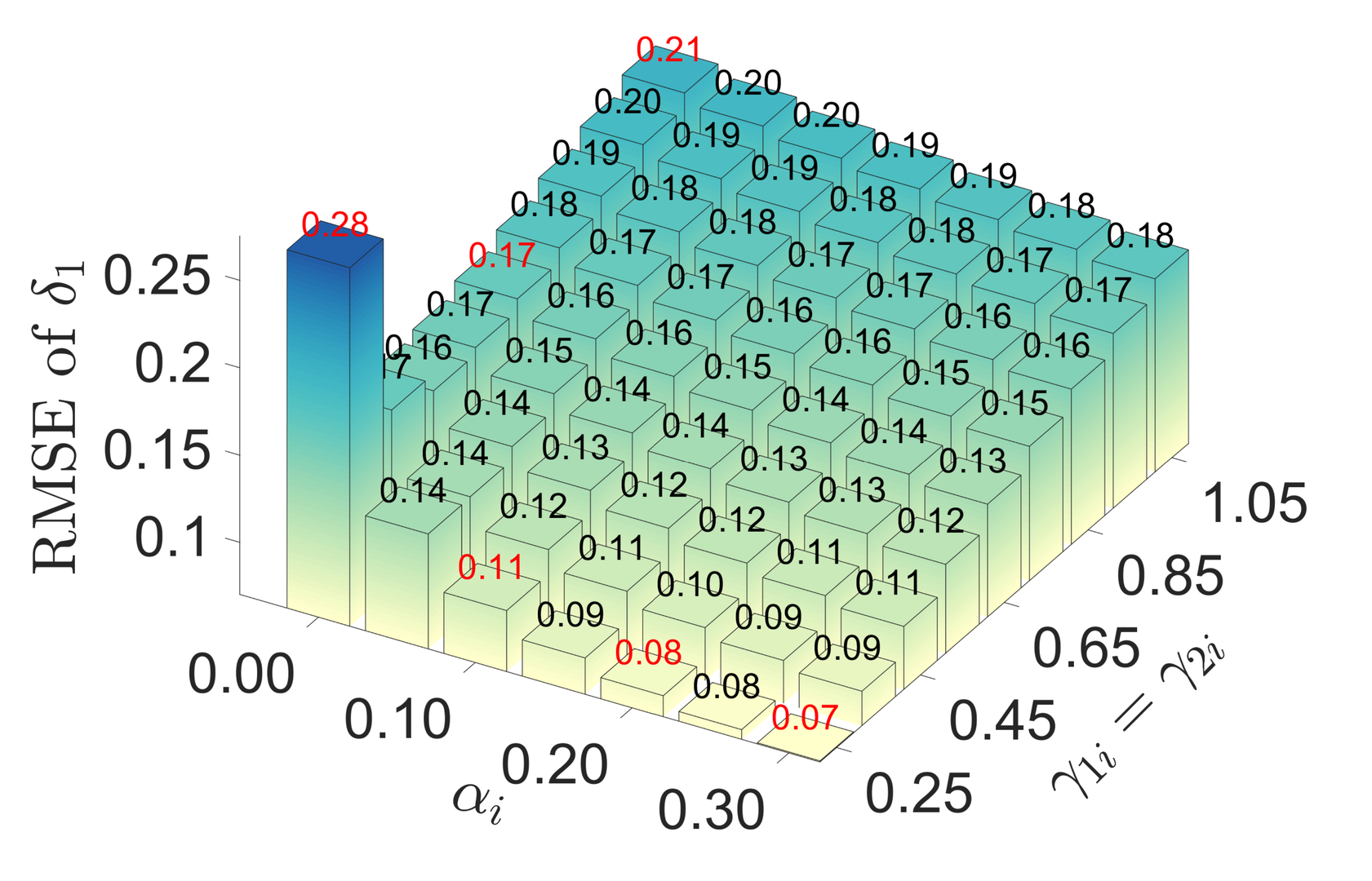
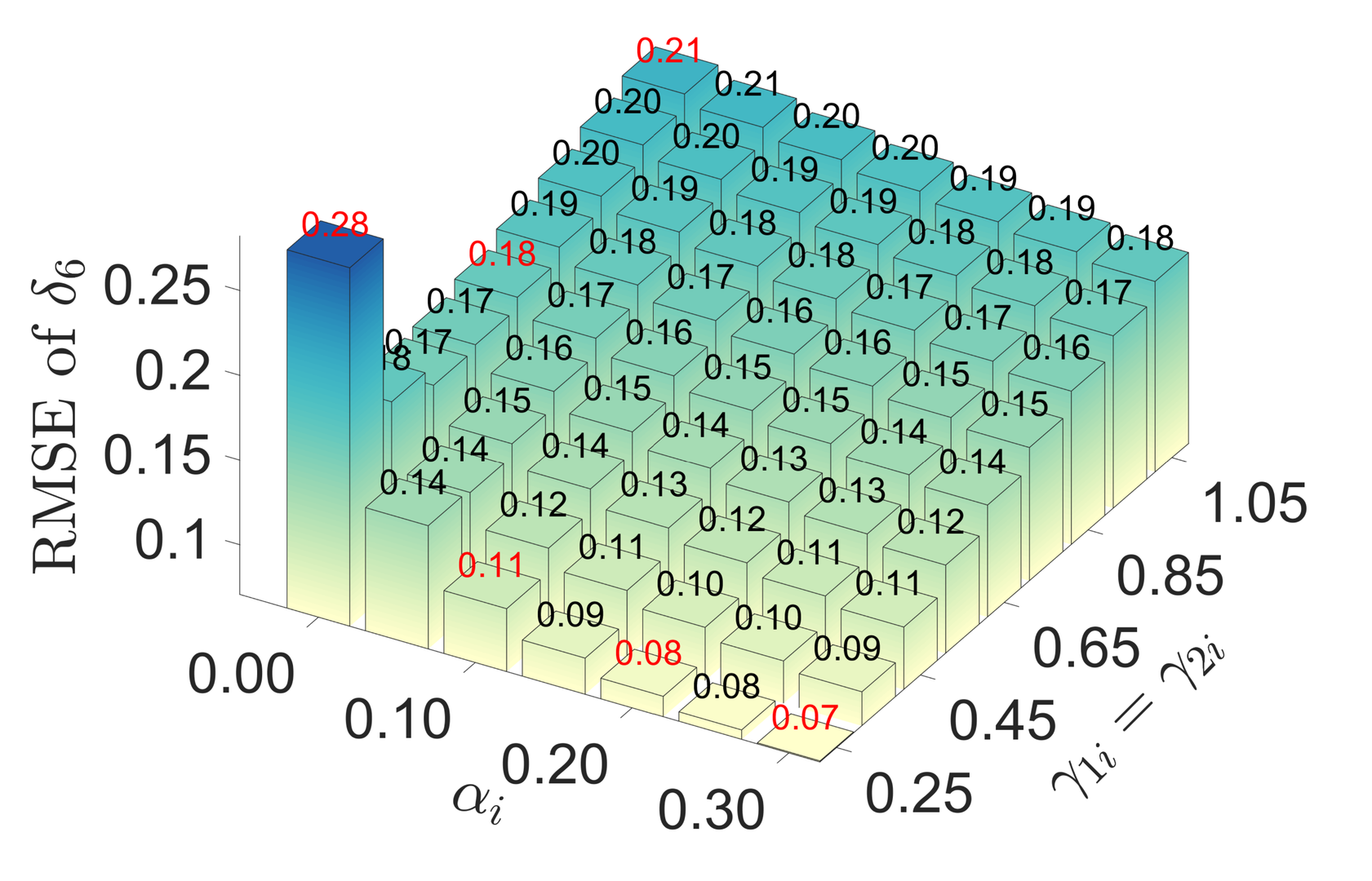
5.1.2. Parameter sensitivity and robustness analysis with different , , and
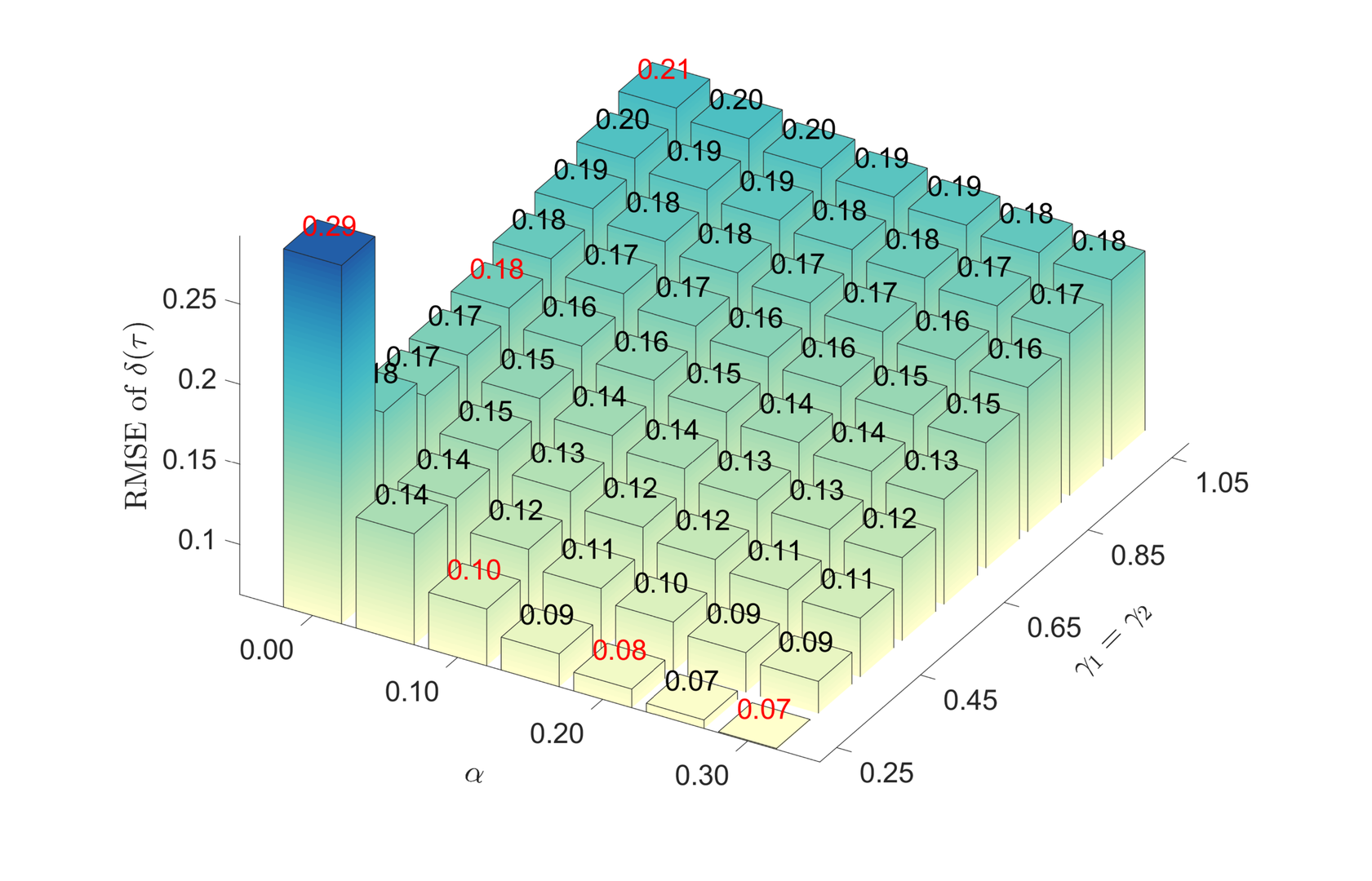 RMSE () comparison for the quadrotor with different proportional gains and derivative gains under strong wind. RMSE () comparison for the quadrotor with different proportional gains and derivative gains under strong wind. |
An evaluation of parameter configurations over and reveals two key trends. When (i.e. P-MRAC) lowering speeds up adaptation but quickly induces oscillation. For a fixed small increasing from 0.10 to 0.30 monotonically suppresses oscillations and cuts RMSE by an order of magnitude. The six highlighted parameter sets visualise this evolution in both error bars and time-domain trajectories.
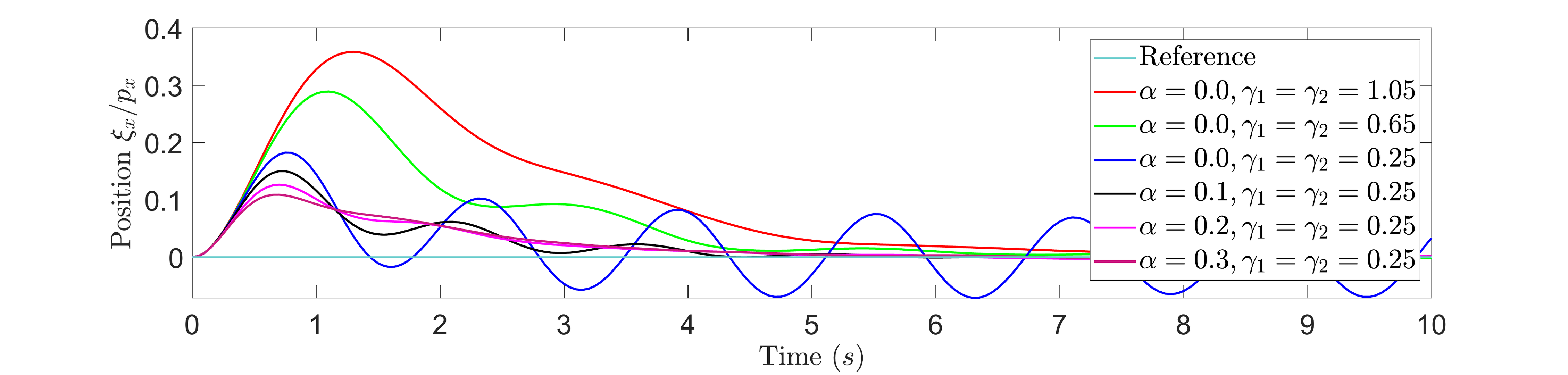 The position trajectory of -axis. The position trajectory of -axis. |
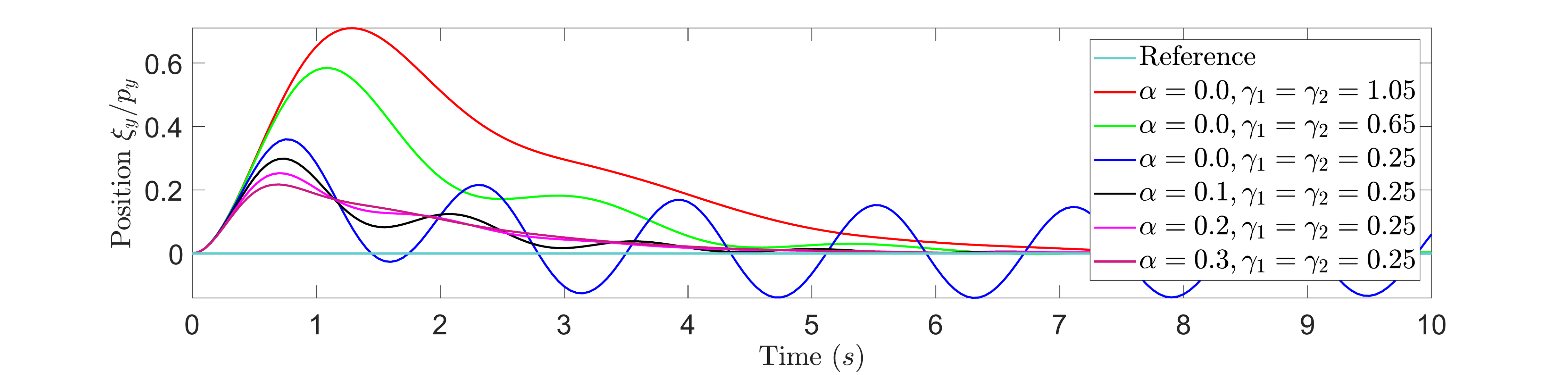 The position trajectory of -axis. The position trajectory of -axis. |
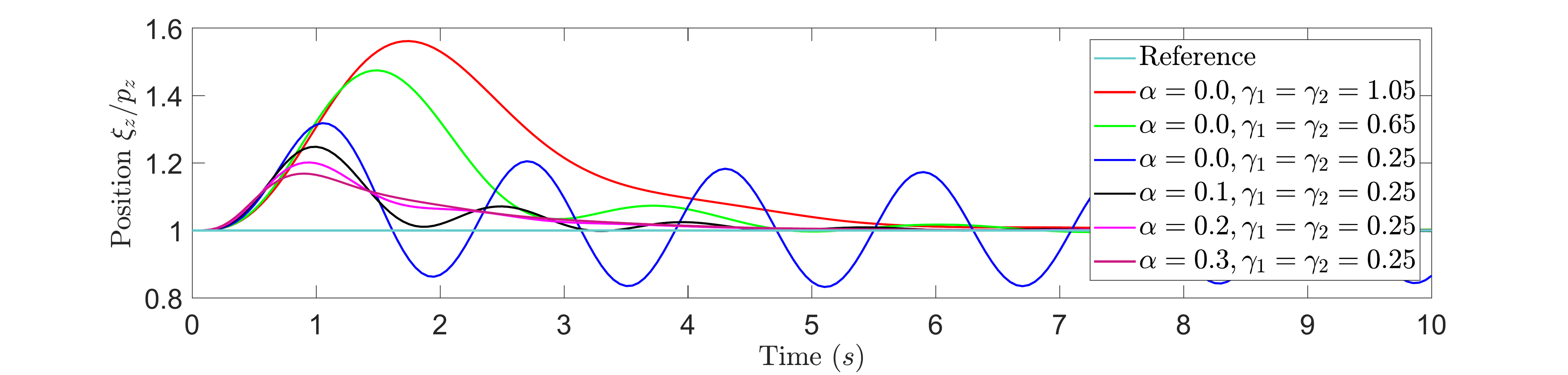 The position trajectory of -axis. The position trajectory of -axis. |
| 3D dynamic flight with P-MRAC under , . | 3D dynamic flight with P-MRAC under , . |
| 3D dynamic flight with P-MRAC under , . | 3D dynamic flight with PD-MRAC under , . |
| 3D dynamic flight with PD-MRAC under , . | 3D dynamic flight with PD-MRAC under , . |
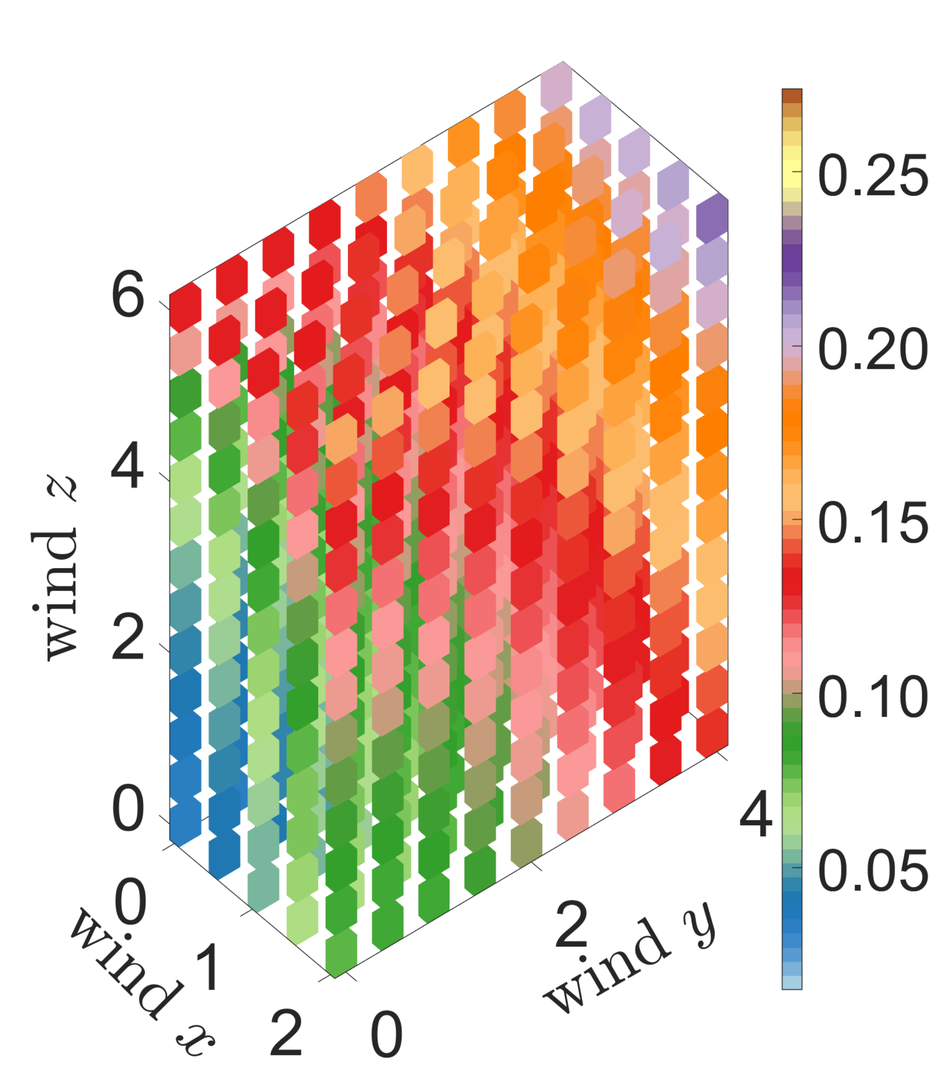
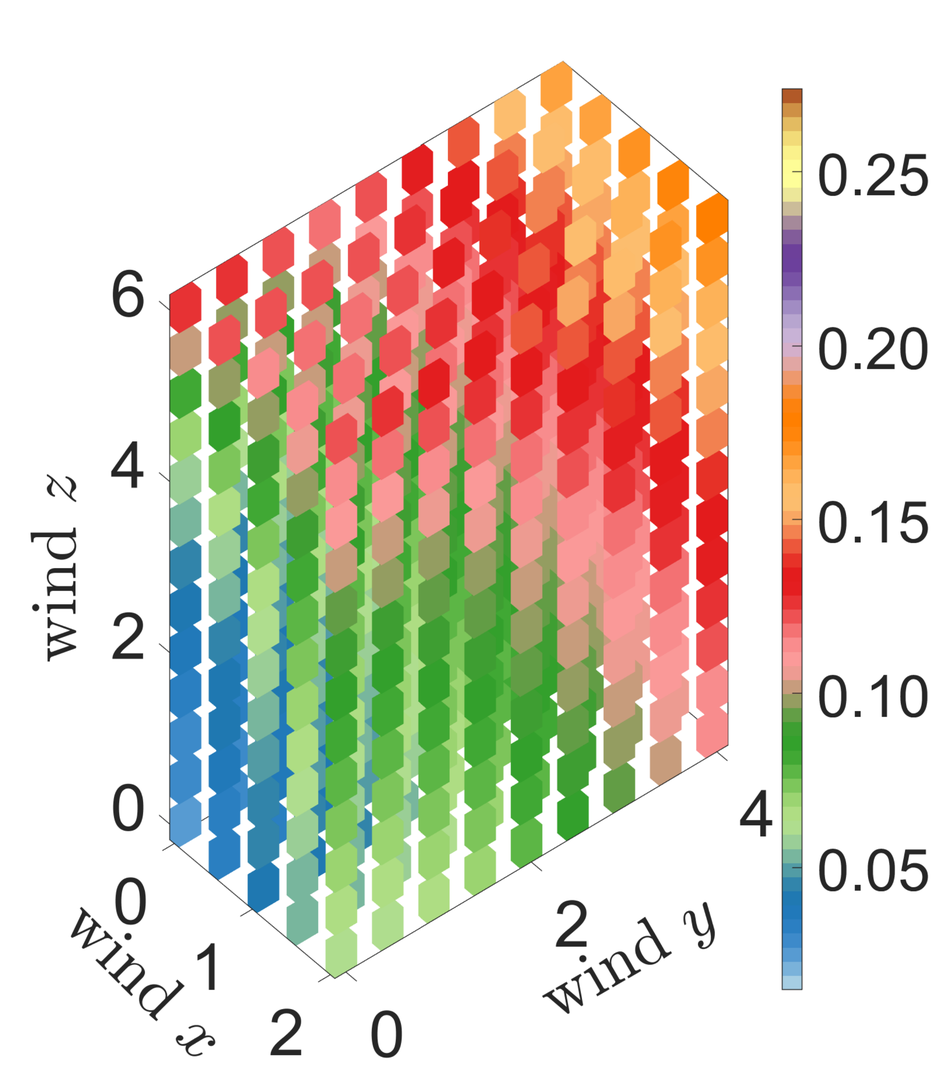
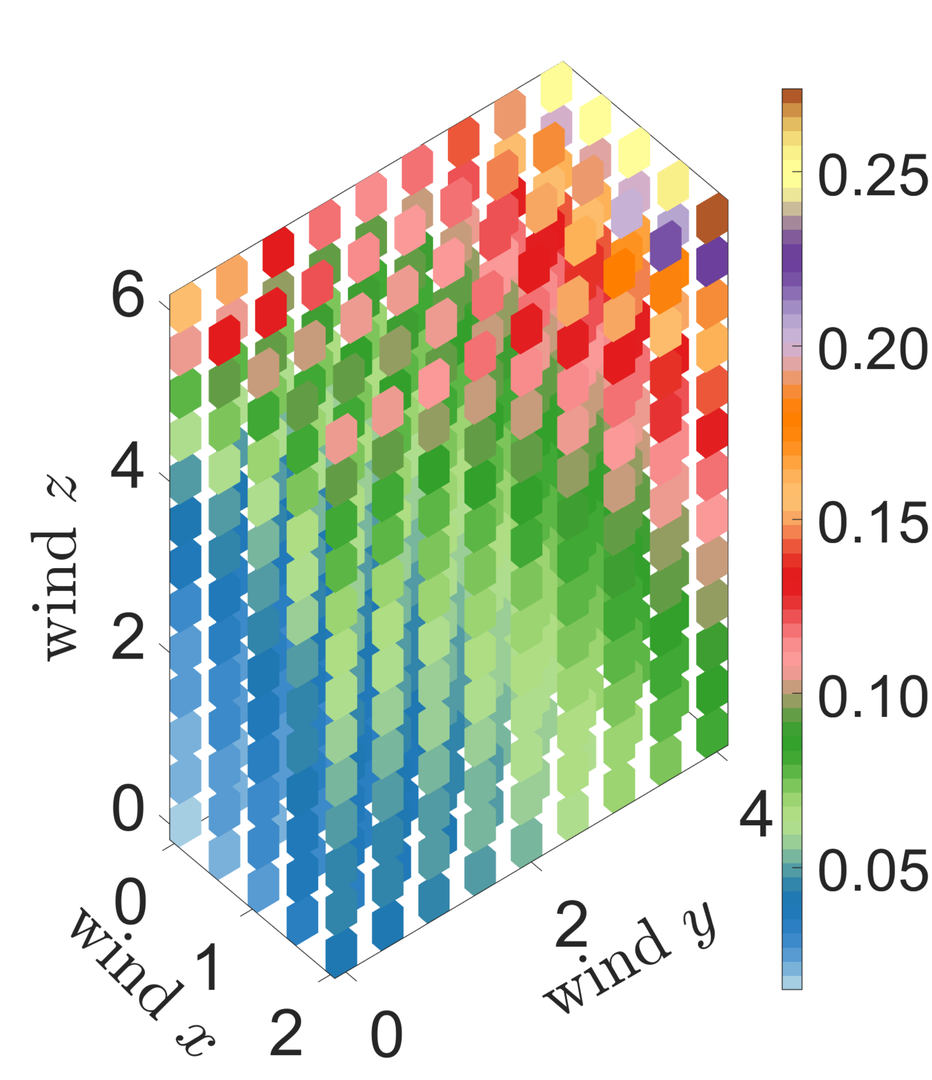
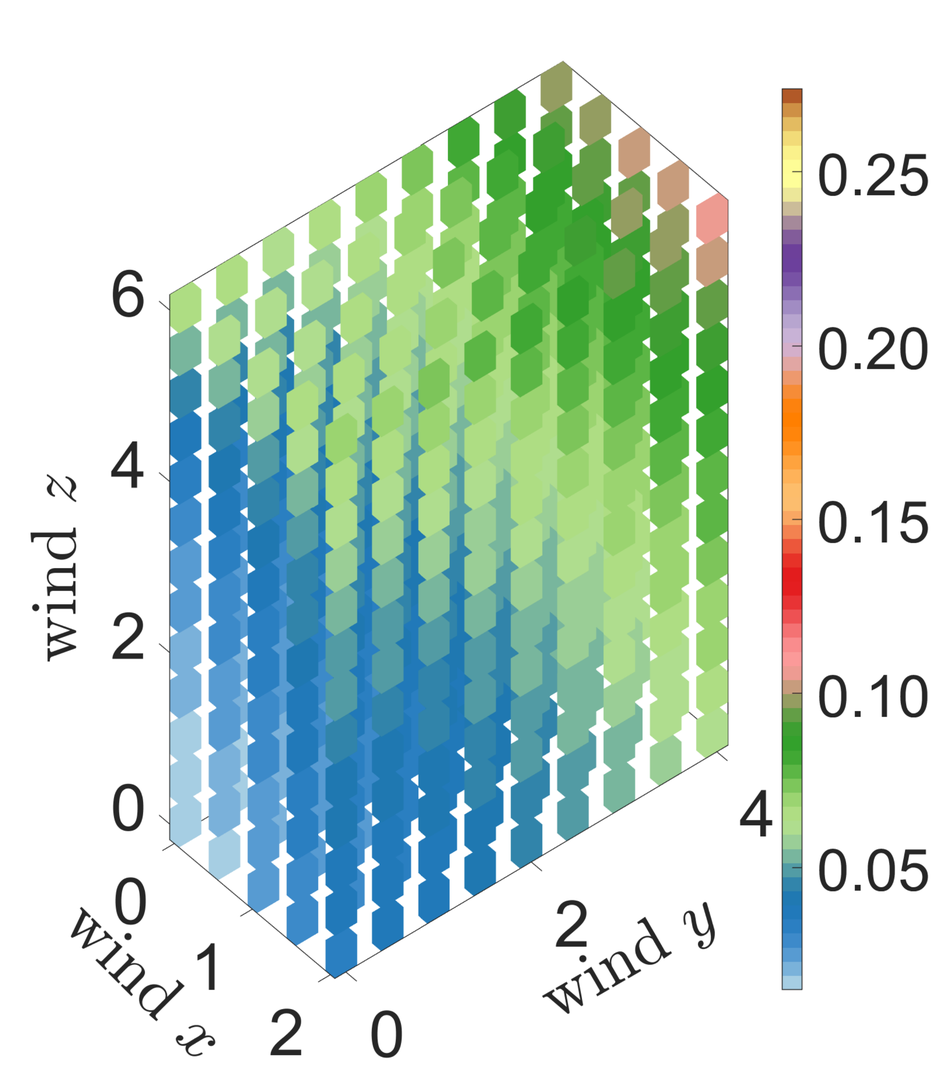
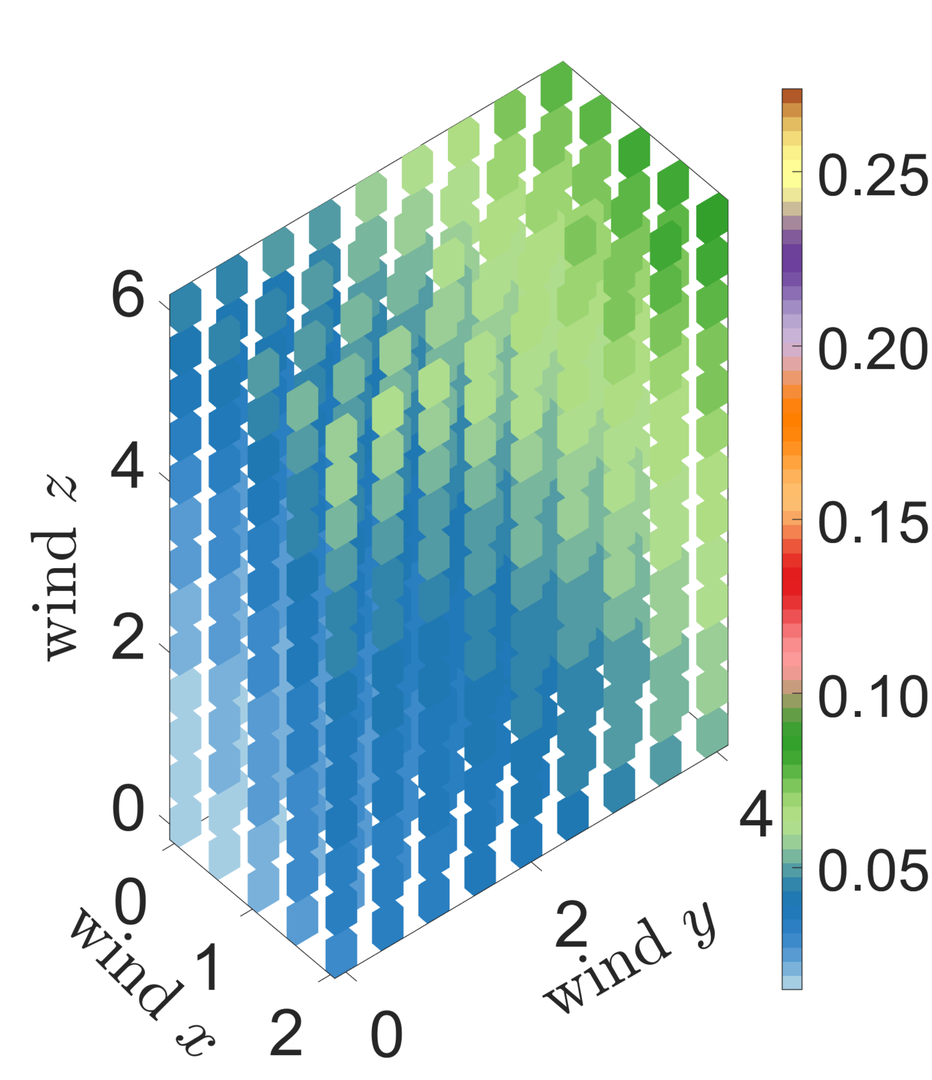
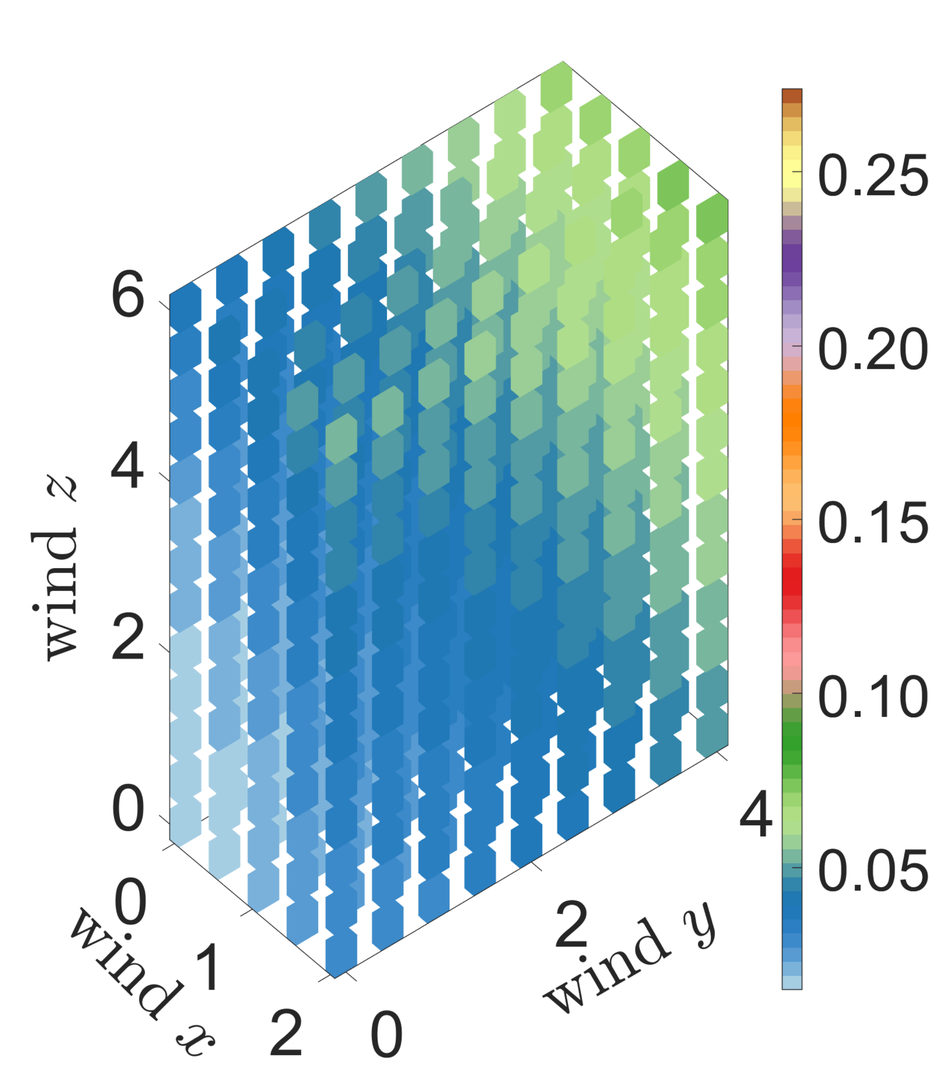
5.1.3. With different wind speed
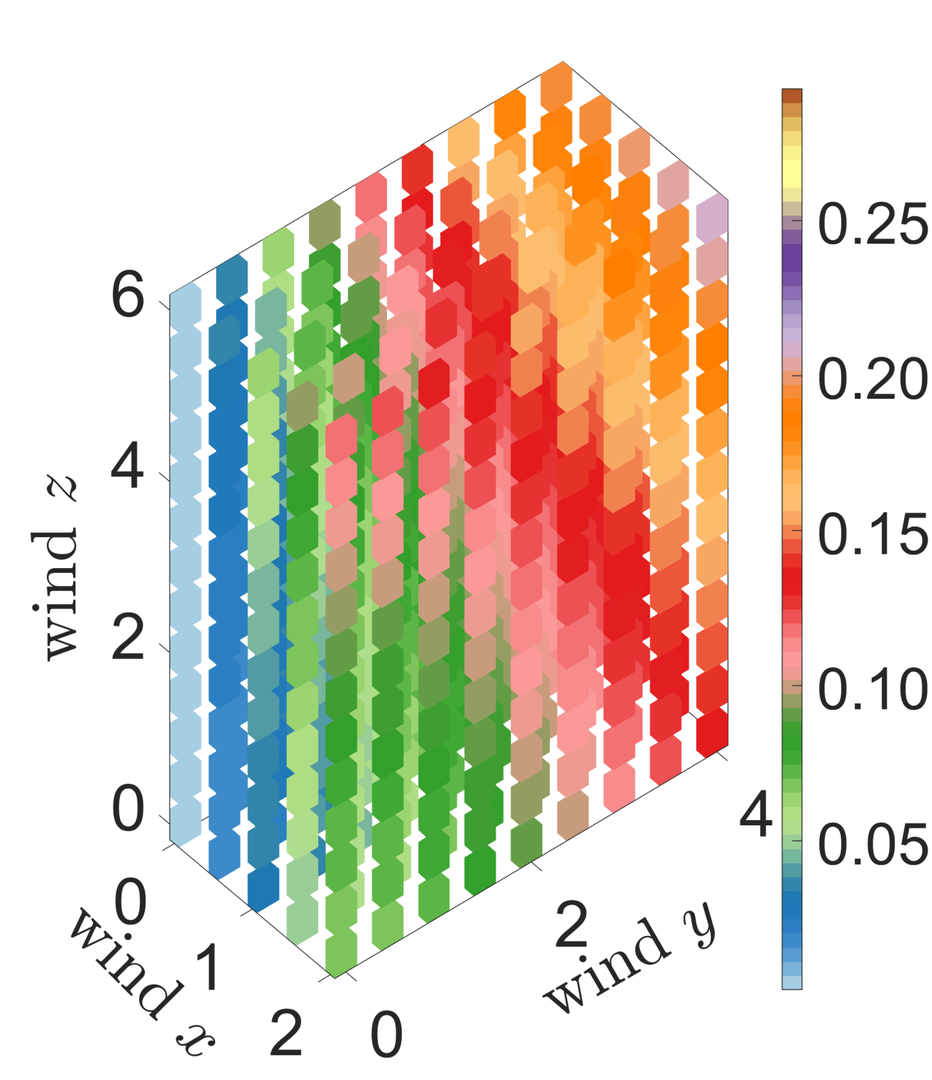 Varying wind speed with parameters , . Varying wind speed with parameters , . |
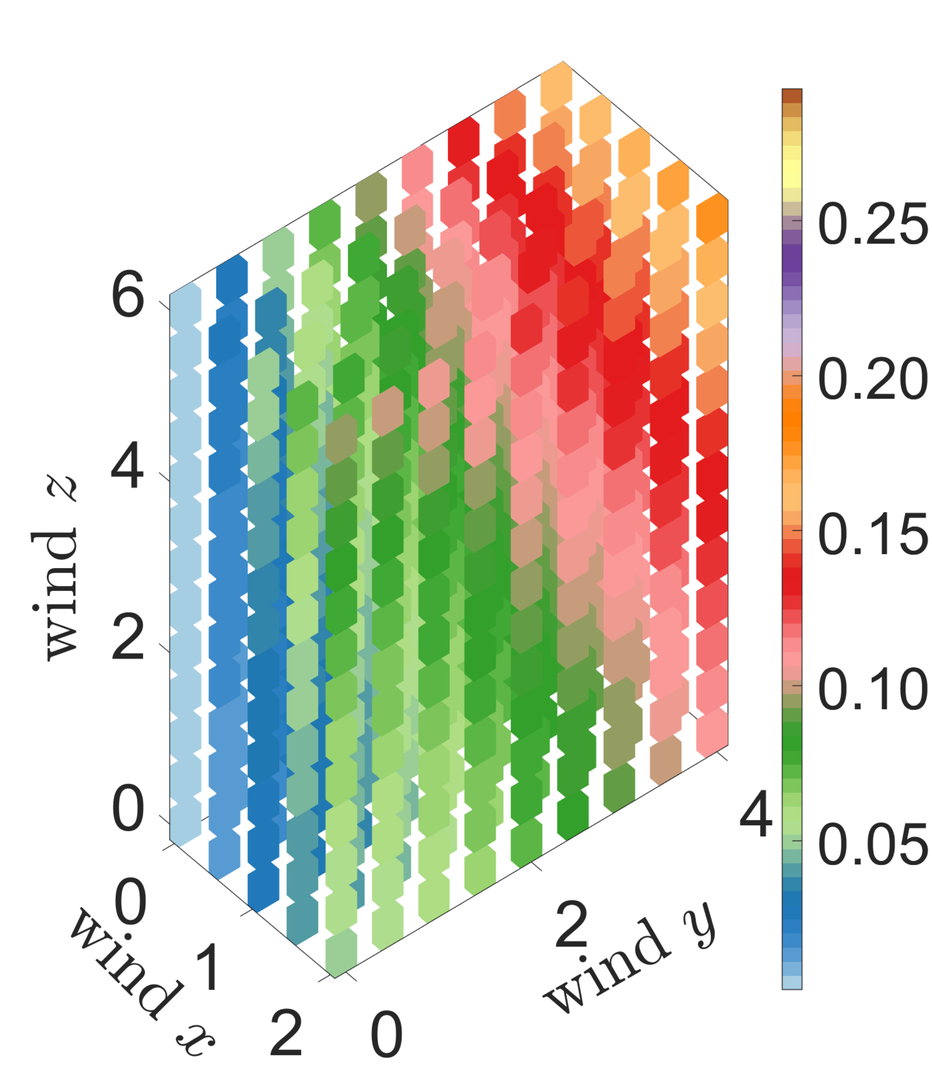 Varying wind speed with parameters , . Varying wind speed with parameters , . |
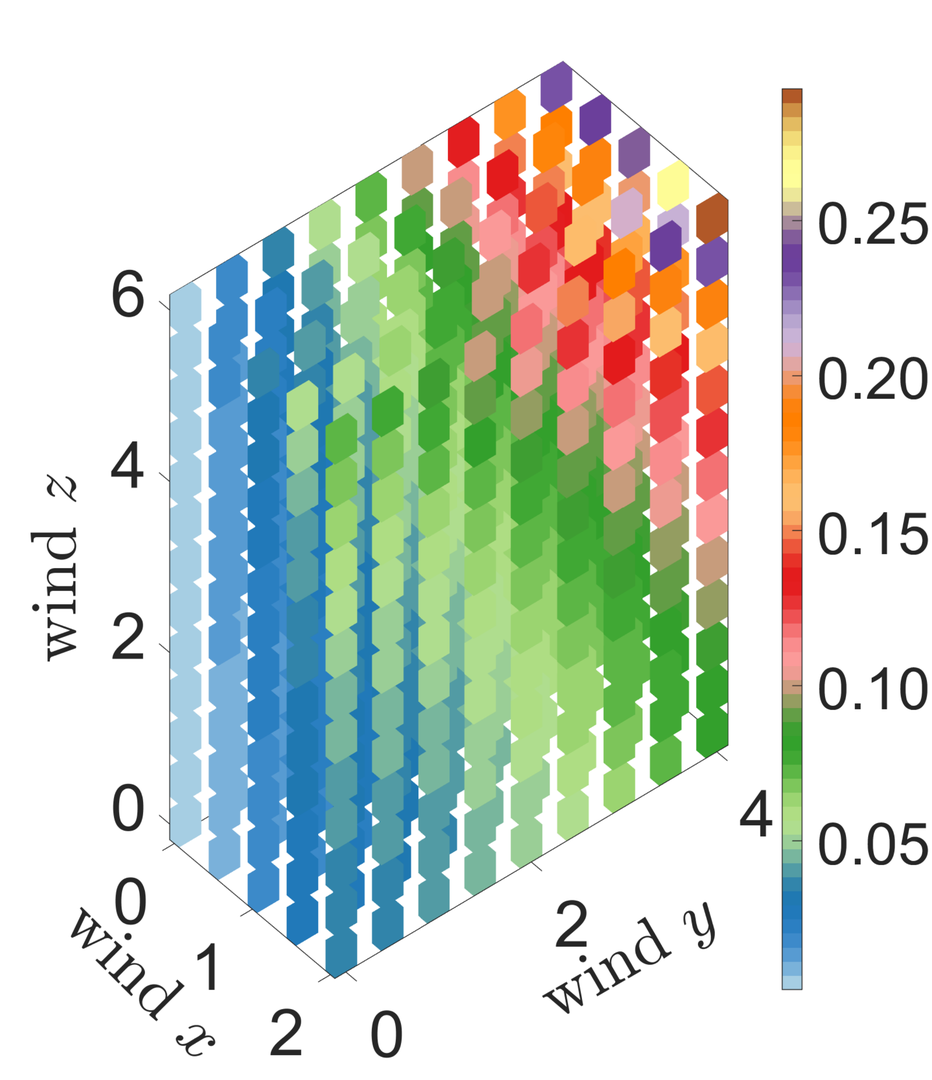 Varying wind speed with parameters , . Varying wind speed with parameters , . |
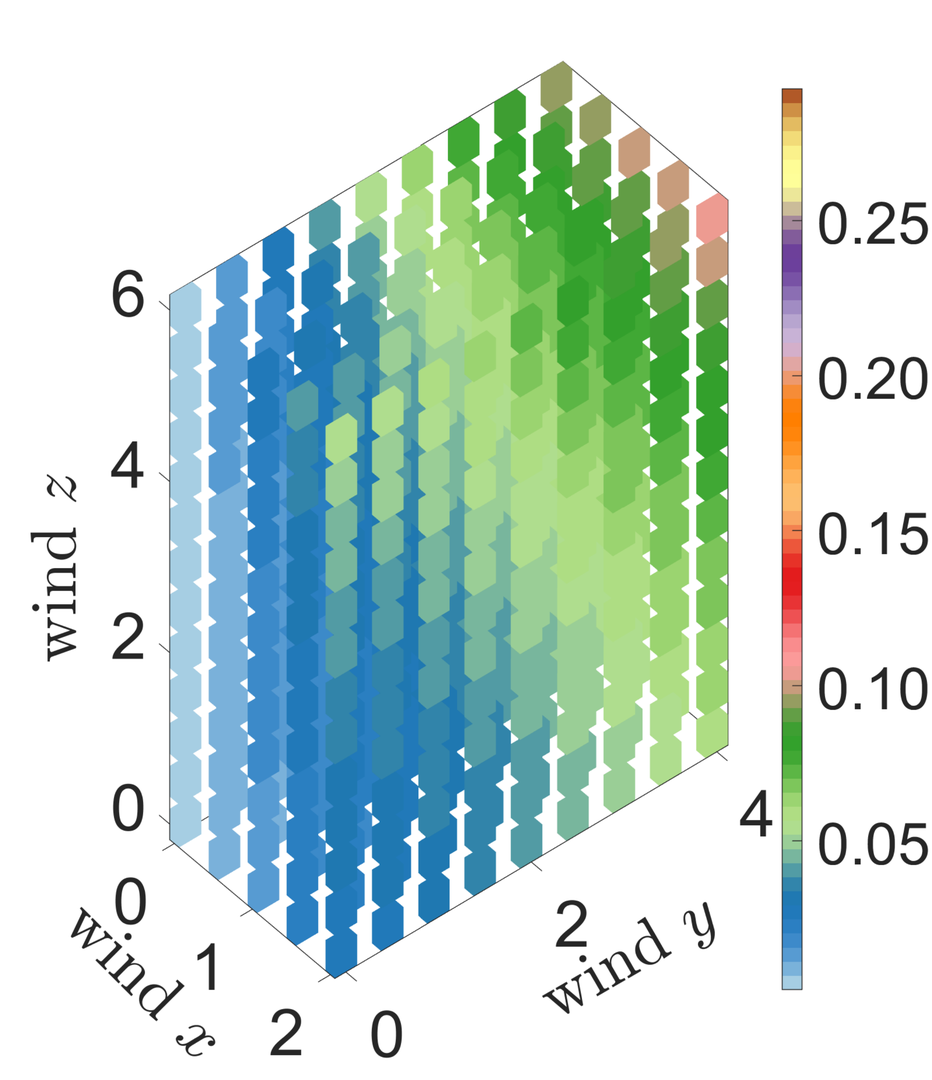 Varying wind speed with parameters , . Varying wind speed with parameters , . |
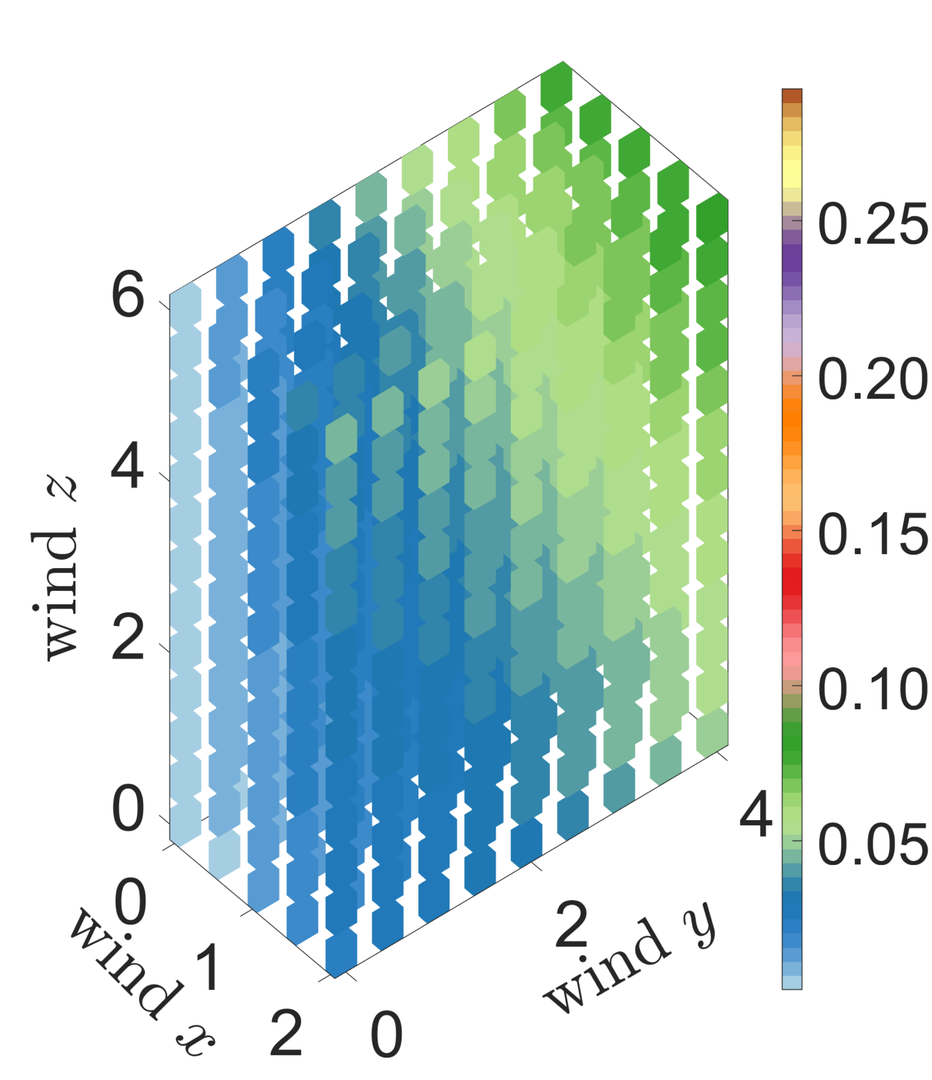 Varying wind speed with parameters , . Varying wind speed with parameters , . |
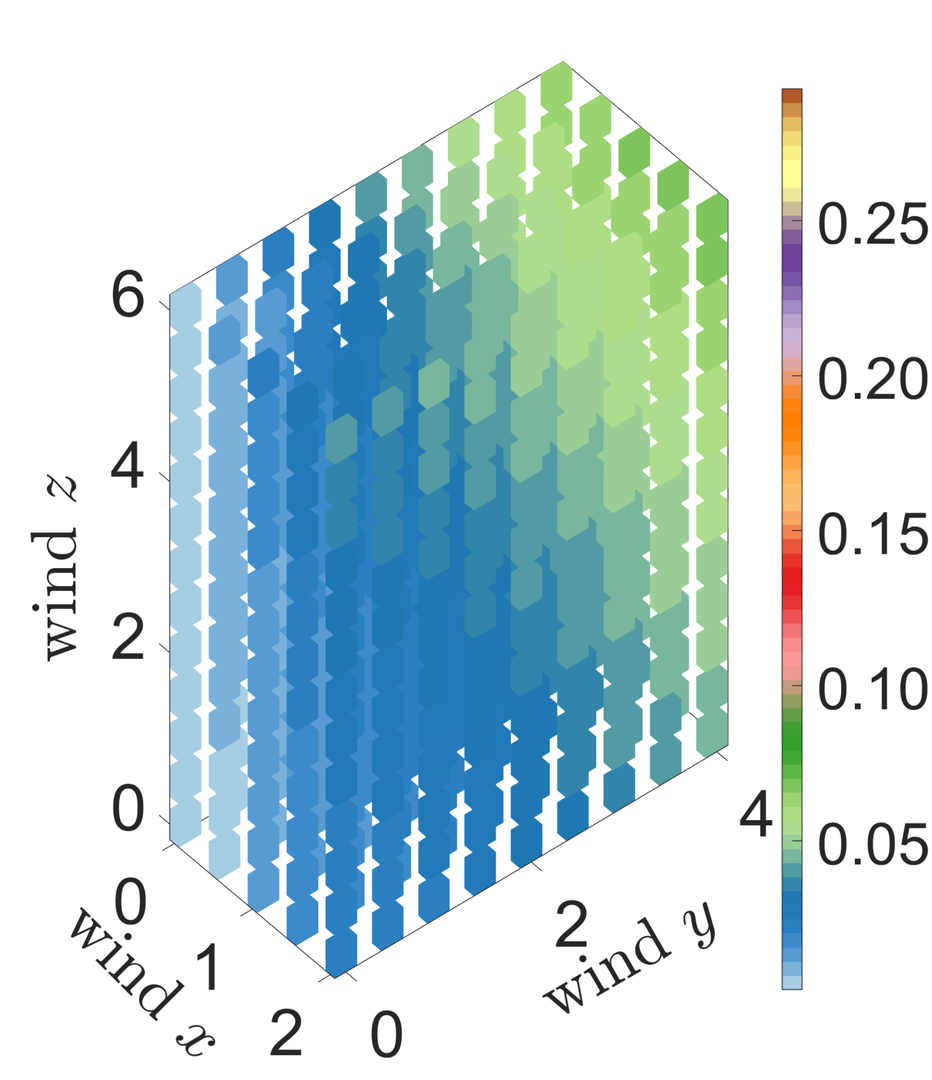 Varying wind speed with parameters , . Varying wind speed with parameters , . |
Six RMSE heat-maps demonstrate disturbance robustness. Whereas P-MRAC shows exponential error growth, PD-MRAC keeps the RMSE below 0.08 throughout the scanned wind cube.
5.2. Multiple quadrotors simulation validation
Building upon the validated performance in the single-quadrotor setting, we extend our investigation to multi-quadrotors formations. This setup reflects more practical and challenging deployment scenarios, where quadrotors must coordinate in the presence of mutual aerodynamic interference, communication constraints, and distributed information flow. We evaluate both the classical distributed P-MRAC and the proposed distributed PD-MRAC under various communication topologies. All quadrotors are subjected to the same environmental disturbances, while their control laws rely only on local neighbor information as defined by the directed graph~. The goal is to maintain cohesive formation tracking with minimal inter-quadrotor deviation. Simulations confirm that the distributed PD-MRAC inherits the strong disturbance rejection properties of its single-quadrotor counterpart. Moreover, by leveraging the future-trend–aware derivative term, it effectively suppresses network-induced oscillations and ensures stability even under highly asymmetric and tightly coupled communication structures. The following sections demonstrate these advantages in detail through formation tracking trajectories, RMSE statistics, parameter sensitivity, and varying wind conditions.
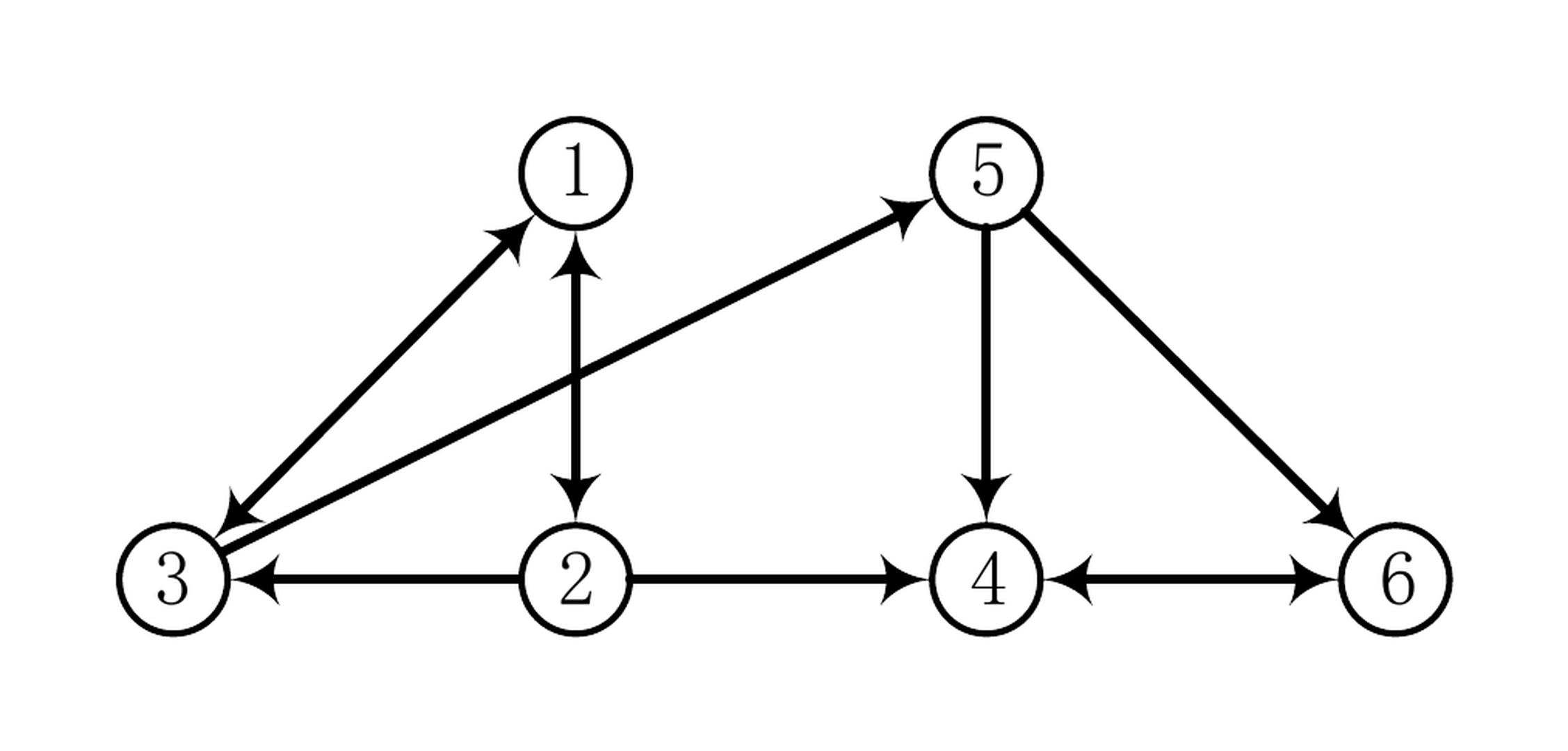 Directed communication network . Directed communication network . |
This topology serves as the structural basis for all subsequent multi-quadrotors simulations and highlights the distributed nature of the control scheme.
5.2.1. The comparision between distributed P-MRAC and distributed future-trend-aware filter-based PD-MRAC
| 3D dynamic flight with P-MRAC (RMSE 0.2715). |
| 3D dynamic flight with PD-MRAC (RMSE 0.0740). |
In the directed graph, distributed P-MRAC converges but oscillates, giving an RMSE of 0.2715. Replacing the proportional law with PD-MRAC () reduces RMSE to 0.0740 and shortens settling time by 63 %, all while withstanding the same wind.
5.2.2. Parameter sensitivity and robustness analysis with different , , and
 Quadrotor 1. Quadrotor 1. |
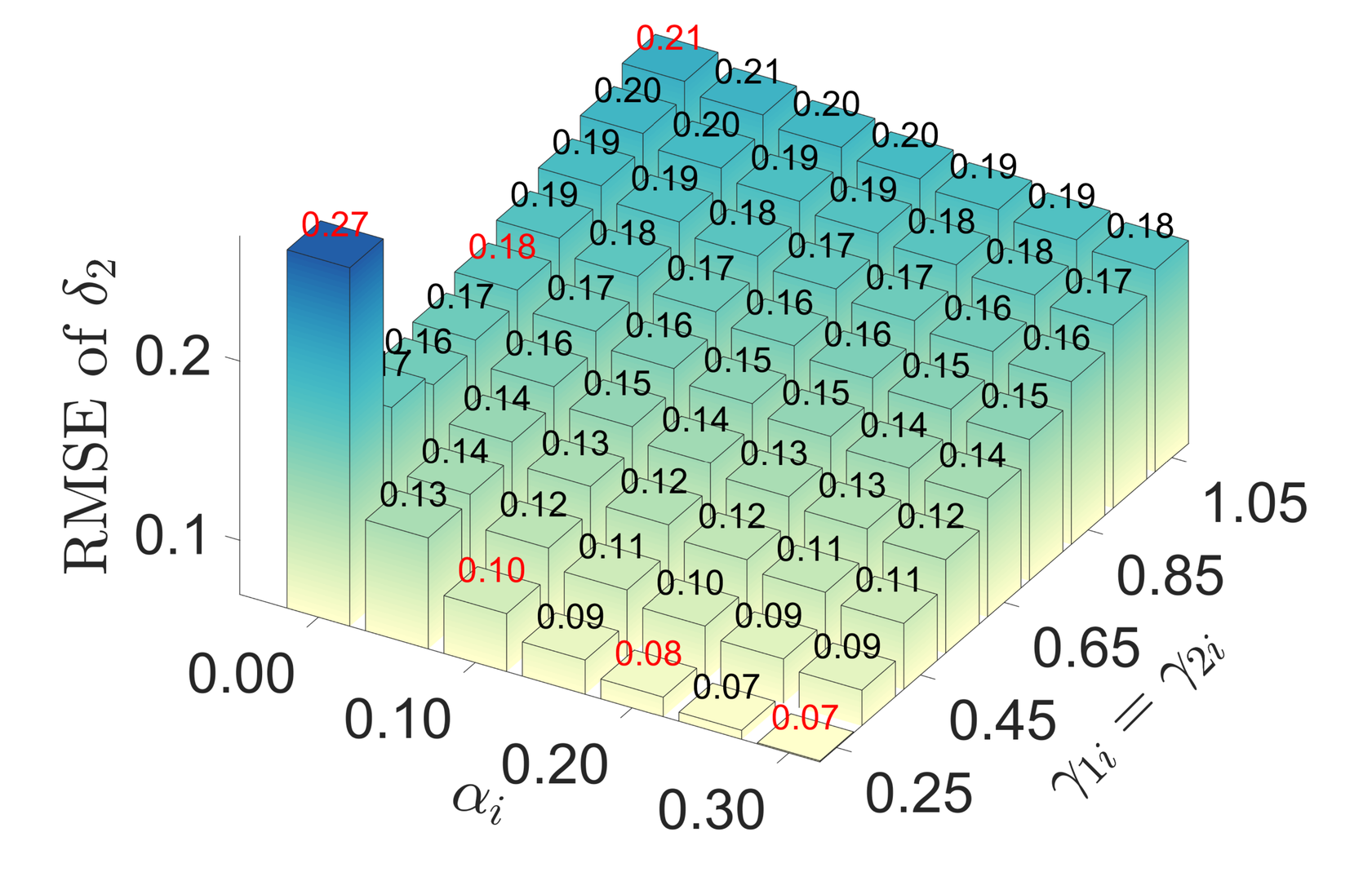 Quadrotor 2. Quadrotor 2. |
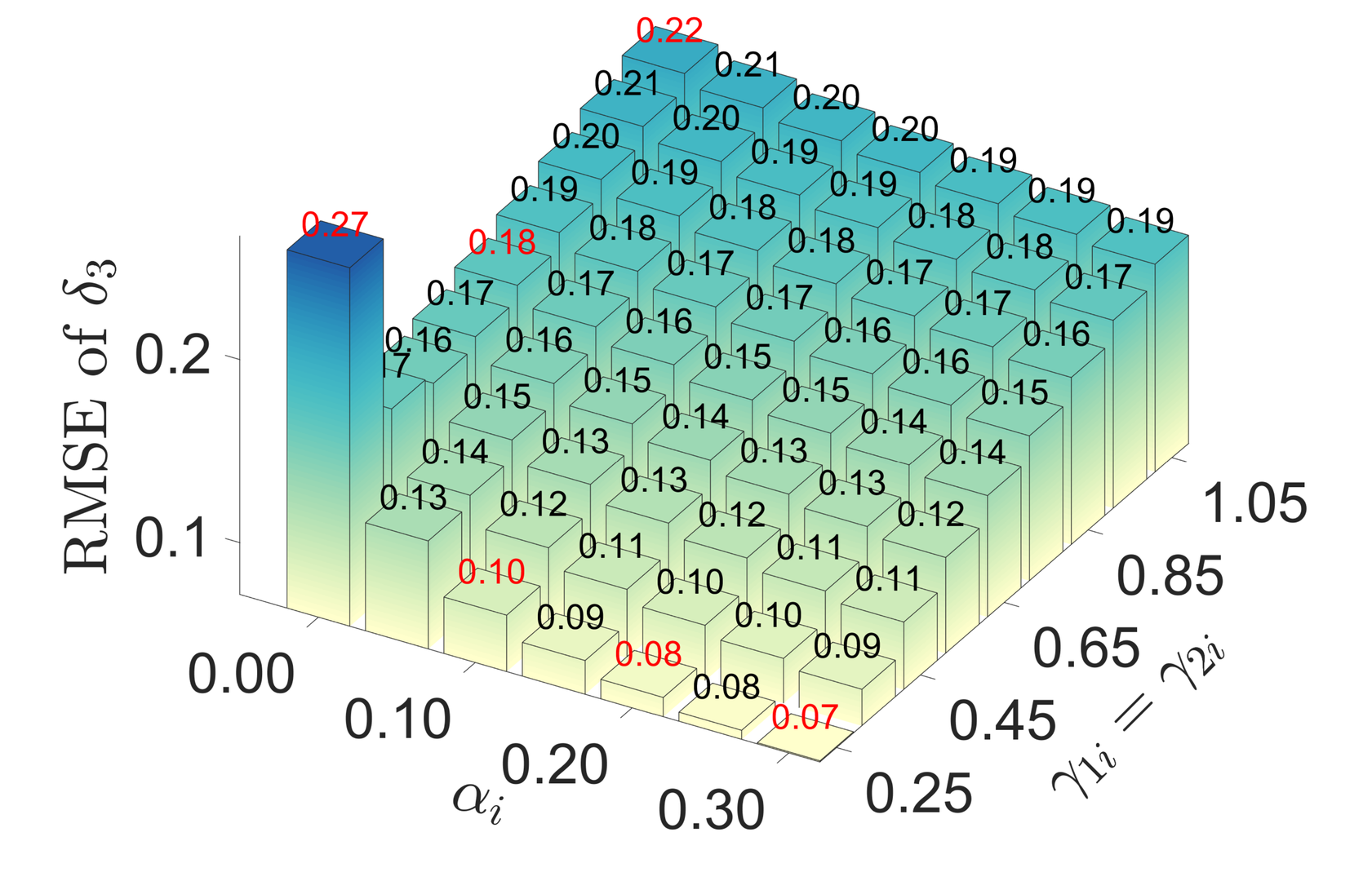 Quadrotor 3. Quadrotor 3. |
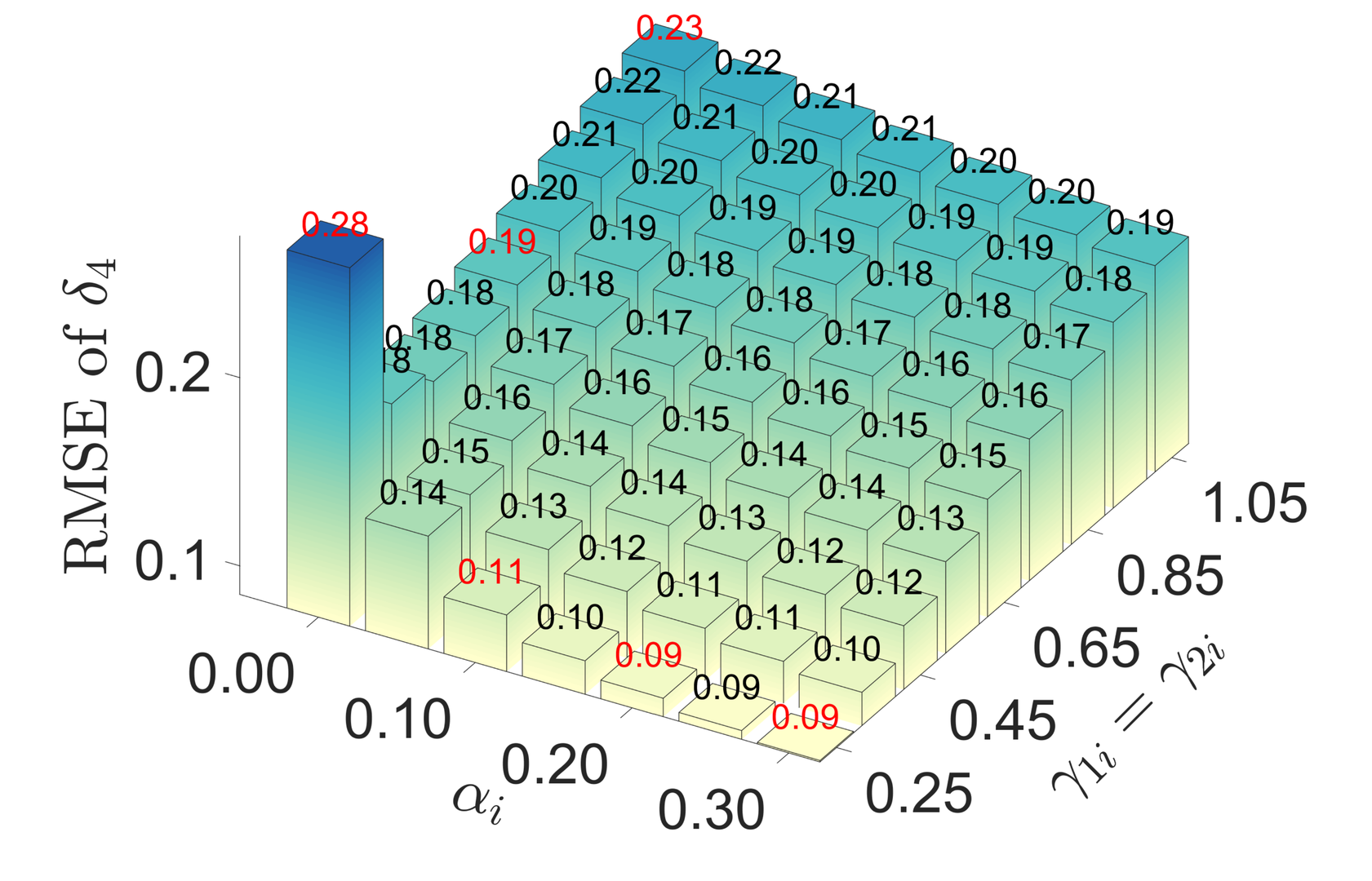 Quadrotor 4. Quadrotor 4. |
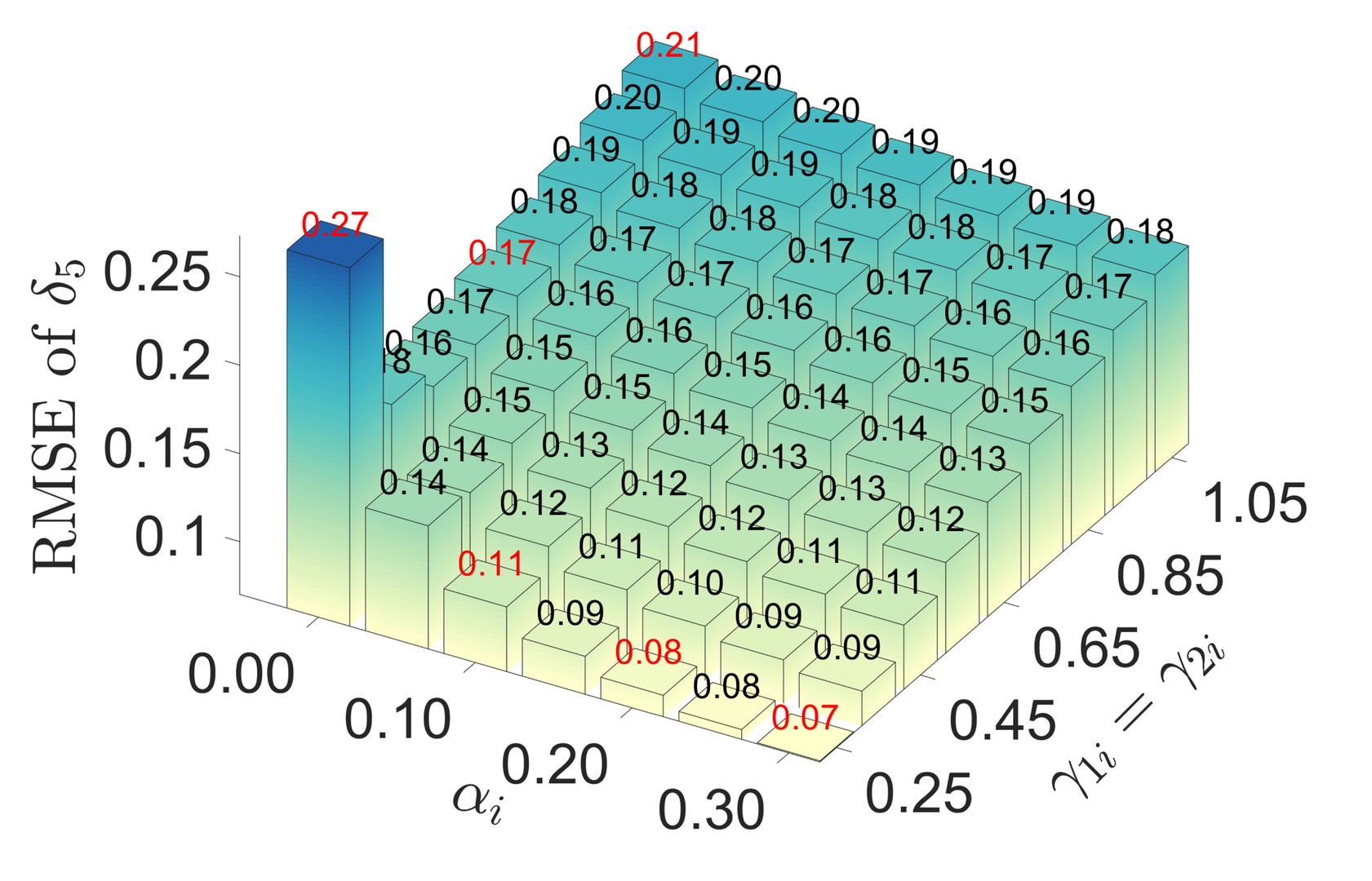 Quadrotor 5. Quadrotor 5. |
 Quadrotor 6. Quadrotor 6. |
The parameter grid confirms that all six quadrotors consistently exhibit the same adaptation pattern observed in the single-quadrotor case. A high proportional gain in the absence of a derivative term leads to widespread oscillations across the network. In contrast, introducing a moderate term effectively stabilizes the trajectories of all quadrotors and concentrates RMSE values within the narrow 0.05 range, highlighting the scalability and robustness of the proposed control strategy.
 The position trajectory of -axis. The position trajectory of -axis. |
 The position trajectory of -axis. The position trajectory of -axis. |
 The position trajectory of -axis. The position trajectory of -axis. |
| 3D dynamic flight with P-MRAC under , . | 3D dynamic flight with P-MRAC under , . |
| 3D dynamic flight with P-MRAC under , . | 3D dynamic flight with PD-MRAC under , . |
| 3D dynamic flight with PD-MRAC under , . | 3D dynamic flight with PD-MRAC under , . |
5.2.3. With different wind speed
 Varying wind speed with parameters , . Varying wind speed with parameters , . |
 Varying wind speed with parameters , . Varying wind speed with parameters , . |
 Varying wind speed with parameters , . Varying wind speed with parameters , . |
 Varying wind speed with parameters , . Varying wind speed with parameters , . |
 Varying wind speed with parameters , . Varying wind speed with parameters , . |
 Varying wind speed with parameters , . Varying wind speed with parameters , . |
Under PD-MRAC the formation error grows only mildly with wind intensity, preserving stability in the full test cube. Conversely, the P-MRAC counterparts enter divergent regimes for several wind vectors, underlining the added robustness of derivative adaptation.
🔬 6. Experiment Results
To evaluate the practical effectiveness of the proposed PD-MRAC controller beyond simulation, we conduct a comprehensive set of real-world experiments. These include single-quadrotor and multi-quadrotor scenarios, under both indoor and outdoor conditions with strong disturbances. The results validate the theoretical robustness and demonstrate the controller’s applicability to real flight tasks involving significant environmental uncertainty.
6.1. Single quadrotor experimental validation
This section presents experimental results for a single quadrotor executing reference tracking tasks under strong wind disturbances. The focus is on comparing the performance of the proposed PD-MRAC controller with that of conventional P-MRAC and a commercial-grade DJI Mavic 2 platform. All experiments are conducted using onboard sensing and computation.
6.1.1. Custom-built quadrotor configurations
To validate the proposed PD-MRAC framework under real-world conditions, we developed a custom-built quadrotor platform. This system was designed to support fully autonomous flight with onboard computation and state estimation, enabling realistic testing without reliance on external motion capture systems for feedback control. The platform integrates the PX4 open-source autopilot firmware for low-level flight stabilization and sensor integration. A high-performance Intel NUC i7 onboard computer is used to execute high-level control and estimation algorithms in real-time. State estimation is achieved using the VINS-Fusion framework, which fuses data from a stereo camera and inertial measurement unit (IMU) to provide robust visual-inertial odometry. This allows the platform to operate effectively even in GPS-denied and dynamically disturbed environments. All proposed control algorithms, including the baseline P-MRAC and the proposed future-trend-aware PD-MRAC, are executed onboard with no external position feedback. The motion capture system is used strictly for ground-truth logging, ensuring a fair and practical comparison with commercial flight controllers such as those on the DJI Mavic 2. This configuration provides a flexible and realistic testbed for evaluating flight control algorithms under strong wind disturbances, sudden dynamic variations, and complex indoor or outdoor environments. It also facilitates consistent benchmarking across simulation and physical testing phases.
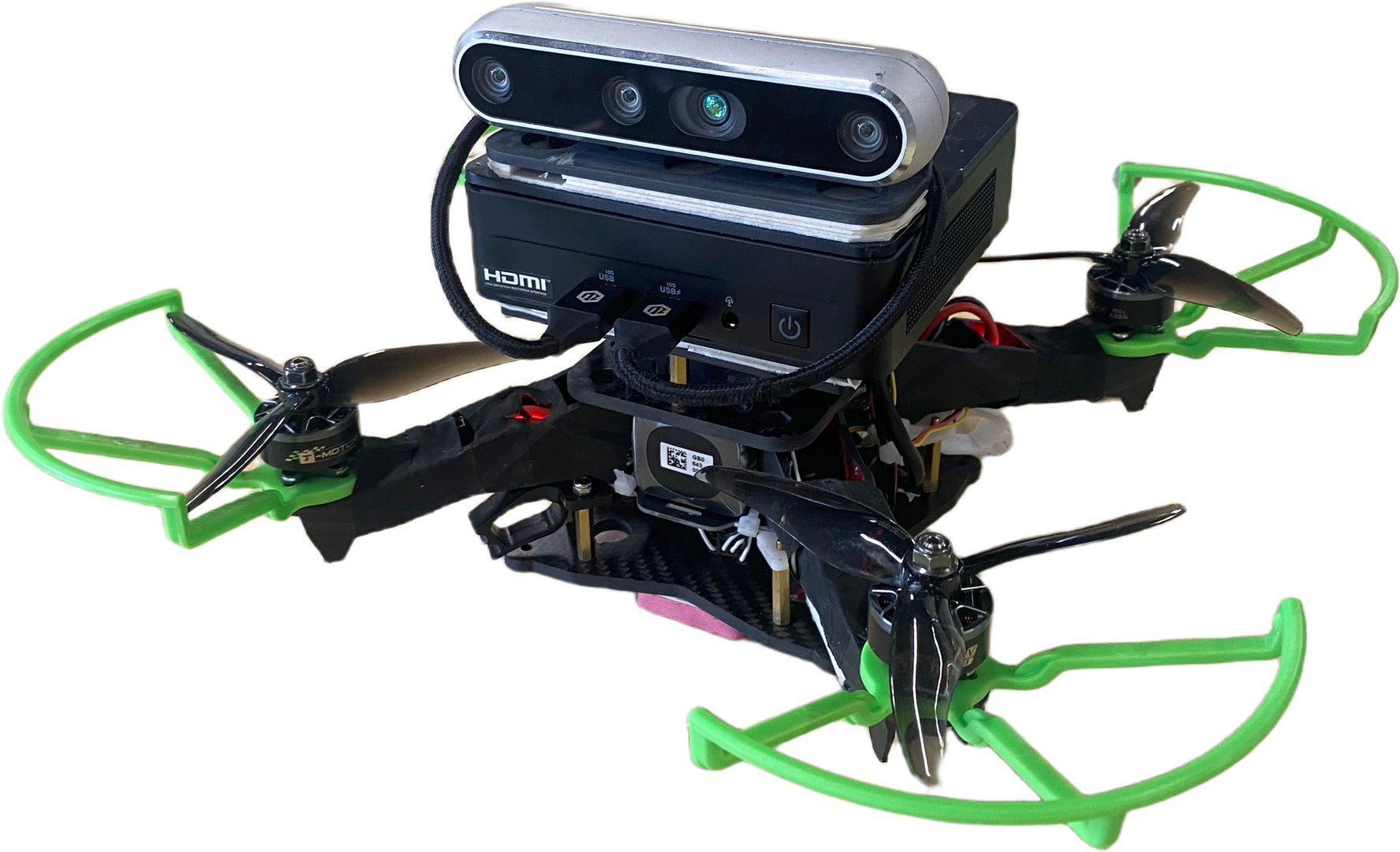 The custom-built quadrotor platform. The custom-built quadrotor platform. |
The system integrates the PX4 autopilot with an onboard Intel NUC i7 computer running VINS-Fusion.
6.1.2. Experiment results with P-MRAC and future-trend-aware filter-based PD-MRAC
| 3D dynamic flight with P‑MRAC (RMSE 0.0475). |
| 3D dynamic flight with PD‑MRAC (RMSE 0.0229). |
Under the P-MRAC controller configured with and , the quadrotor exhibits persistent lateral oscillations of approximately m, resulting in a tracking RMSE of 0.0475. In contrast, the proposed PD-MRAC, with and , effectively eliminates the oscillations. The lateral tracking error remains constrained within cm, and the RMSE is reduced to 0.0229, representing a 52 % improvement in tracking accuracy.
6.1.3. Comparison with commercial-grade DJI Mavic 2
 The DJI Mavic 2 platform. The DJI Mavic 2 platform. |
 The custom-built quadrotor platform. The custom-built quadrotor platform. |
| 3D dynamic flight with DJI Mavic 2 (RMSE 0.0288). |
| 3D dynamic flight with PD-MRAC (RMSE 0.0254). |
Under identical wind conditions, both the commercial DJI Mavic 2 and the custom-built quadrotor rely exclusively on their onboard visual–inertial odometry, with the motion capture system used solely for logging purposes and not for feedback control. The DJI Mavic 2, equipped with industrially tuned proprietary controllers, achieves a tracking RMSE of 0.0288. In comparison, the custom quadrotor operating under the proposed PD-MRAC achieves a lower RMSE of 0.0254, representing an improvement of 11.81 %. This result demonstrates that the proposed method can outperform a state-of-the-art commercial platform, even under strong wind disturbances.
6.2. Double quadrotors experimental validation
To examine the effectiveness of the proposed PD-MRAC scheme in distributed settings, we extend our experiments to dual-quadrotors formations. These setups introduce inter-quadrotor coupling and communication, representing a minimal but nontrivial case for formation control. We evaluate two distinct network topologies: a directed line and a bidirectional ring.
6.2.1. Line topology
 Directed communication network (Line topology) . Directed communication network (Line topology) . |
| 3D dynamic flight with P-MRAC (RMSE 0.1577). |
| 3D dynamic flight with PD-MRAC (RMSE 0.0342). |
In the line topology, a directed communication graph introduces asymmetry in information flow. Under P-MRAC, the system exhibits visible oscillations along the -axis, with a tracking RMSE of 0.1577. In contrast, the proposed PD-MRAC maintains smooth leader–follower behaviour, despite the unilateral coupling structure, achieving a significantly lower RMSE of 0.0342.
6.2.2. Ring topology
 Directed communication network (Ring topology) . Directed communication network (Ring topology) . |
 Experimental environment for double quadrotor flight under strong wind conditions. Two industrial fans and quadrotors flying generate a shared wind field, the intensity of which is visually demonstrated by the blowing banners on the wall. Experimental environment for double quadrotor flight under strong wind conditions. Two industrial fans and quadrotors flying generate a shared wind field, the intensity of which is visually demonstrated by the blowing banners on the wall. |
| 3D dynamic flight with P-MRAC (RMSE 11.8613). |
| 3D dynamic flight with PD-MRAC (RMSE 0.0302). |
In the ring topology, bidirectional coupling introduces feedback loops that can amplify disturbances. Under such conditions, the P-MRAC controller fails to maintain stability and diverges, resulting in a crash at 50 seconds and a final RMSE of 11.8613.By contrast, the proposed PD-MRAC preserves Lyapunov stability and achieves an RMSE of 0.0302, demonstrating superior robustness to feedback-induced amplification.
6.3. Multiple quadrotors experimental validation
 Directed communication network . Directed communication network . |
| 3D dynamic flight with PD-MRAC (RMSE 0.0416). |
In a tightly spaced configuration, rotor downwash effects and proximity-induced aerodynamic coupling present significant challenges. The proposed PD-MRAC maintains formation integrity and achieves a tracking RMSE of 0.0416.
Under natural wind conditions with unpredictable gusts, the same controller gains are used without re-tuning. Despite environmental variability, the quadrotor team maintains stable formation with an RMSE of 0.0390, confirming the environment-invariant robustness of the proposed approach.
🏁 7. Conclusions
This paper has investigated both single quadrotor trajectory tracking and multiple quadrotor formation control under unknown time-varying parameters and strong wind disturbances, where prior knowledge of aerodynamic effects, tracking errors, and disturbance bounds is unavailable. For the single quadrotor case, a suitable nominal reference model has been designed, and a future-trend-aware filter-based PD-MRAC framework has been proposed, incorporating a PD-based adaptive gain and an adaptive uncertainty compensation mechanism. This framework has effectively handled time-varying uncertainties and significantly suppressed oscillations caused by strong disturbances. For the multiple quadrotor case, a distributed future-trend-aware filter-based PD-MRAC formation control framework has been developed, with a distributed reference model based on local relative formation targets among neighbors. This design has effectively addressed challenges from complex directed communication topologies. Extensive simulations and real-world experiments have been conducted on single, double, and six quadrotor systems, including both indoor and outdoor flights. The proposed framework have been thoroughly compared with several classical control methods and a commercial grade DJI Mavic 2. The results have demonstrated superior robustness, stability, and adaptability under severe disturbances, strongly supporting the practical applicability of the proposed method.